- Как сделать поворотное устройство для солнечной панели: лучшие идеи
- Преимущества
- Составные элементы трекера
- Электронные системы поворота
- Принцип работы
- Положительные стороны
- Как сделать своими руками
- Часовой механизм поворота
- Водяные часы
- Видео
- Устройство слежения за солнцем
- Двухосевой солнечный трекер на Arduino
- Фигура первая: конструкторская
- Фигура вторая: схемотехническая
- Фигура третья: паяльная
- Фигура четвёртая: с новым кодом!
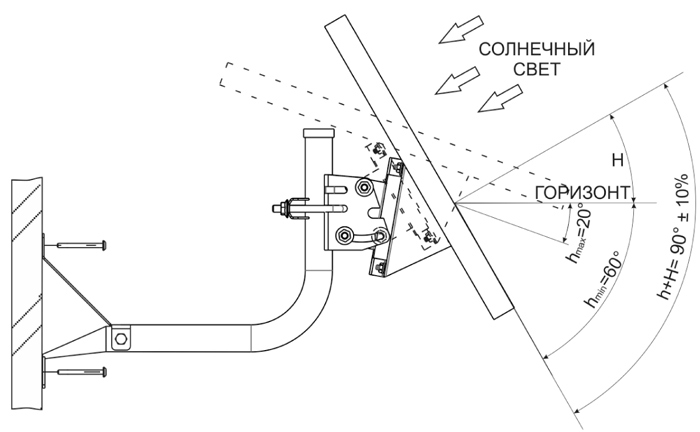
Как сделать поворотное устройство для солнечной панели: лучшие идеи
В настоящее время множество людей переходит на солнечные фонарики для сада, к примеру, или на зарядное устройство для телефона. Как всем известно, и понятно, работает такая зарядка от полученной днем солнечной энергии. Однако светило не стоит на месте целый день, а потому, создав поворотное устройство для солнечной батареи своими руками, можно повысить эффективность зарядка примерно в половину, передвигая батарею по направлению к солнцу на протяжении всего дня.

Преимущества
Трекер для солнечных панелей своими руками обладает несколькими очень весомыми преимуществами, которые стоят того, чтобы потратить время на его изготовление и установку.
- Первое и наиболее важное преимущество – это то, что поворот солнечного элемента в течение всего дня может повысить КПД батареи примерно в половину. Достигается это за счет того, что максимально эффективная работа солнечных батарей достигается в период, когда лучи от светила падают перпендикулярно на фотоэлемент.
- Второе преимущество устройства создается под влиянием первого. Из-за того, что батарея повышает свою эффективность и производит вполовину больше энергии, отпадает необходимость установки дополнительных стационарных батарей. К тому же сама поворотная батарея может обладать меньшим фотоэлементом, чем при стационарном способе. Все это экономит большие материальные средства.
Составные элементы трекера
Создание поворотного устройства для солнечных панелей своими руками включает в себя те же комплектующие, что и заводские товары.
Список обязательных деталей для создания такого устройства:
- Основа или каркас – состоит из несущих деталей, которые подразделяются на две категории – это подвижные и неподвижные. В некоторых случаях каркас имеет подвижную часть лишь с одной осью – горизонтальной. Однако есть модели и с двумя осями. В таких случаях нужны актуаторы, которые управляют вертикальной осью.
- Описанный ранее актуатор также должен входить в конструкцию и обладать устройствами не только поворота, но и устройствами контроля за этими действиями.
- Необходимы детали, которые будут защищать устройство от капризов погоды – гроза, сильный ветер, дождь.
- Возможность удаленного управления и доступа к поворотному устройству.
- Элемент, преобразующий энергию.
Но стоит отметить, что сбор такого устройства иногда дороже, чем покупка уже готового, а потому в некоторых случаях упрощается до несущих деталей, актуатора, управление актуатором.

Электронные системы поворота
Принцип работы
Принцип работы поворотного устройства очень прост и держится на двух деталях, одна из которых механическая, а другая электронная. Механическая часть поворотного устройства соответственно отвечает за поворот и наклон батареи. А электронная часть регулирует моменты времени и углы наклона, по которым действует механическая часть.
Электрооборудование, используемое вместе с солнечными батареями, заряжается от самих же батарей, что в некотором роде также экономит средства на подпитку электроники.

Положительные стороны
Если говорить о достоинствах электронного оборудования для поворотного устройства, то стоит отметить удобство. Удобство заключается в том, что электронная часть устройства будет в автоматическом режиме управлять процессом поворота батареи.
Данное преимущество не единственное, а является лишь еще одним в списке тех, что были перечислены ранее. То есть помимо экономии средств и повышения КПД, электроника освобождает человека от надобности вручную осуществлять поворот.

Как сделать своими руками
Создать трекер для солнечных батарей своими руками несложно, так как схема его создания проста. Для того чтобы создать работоспособную схему трекера своими руками необходимо иметь в наличии два фоторезистора. Кроме этих составляющих, нужно также приобрести моторное устройство, которое будет поворачивать батареи.
Подключение этого устройства осуществляется при помощи Н – моста. Этот метод подключения позволит преобразовывать ток силой до 500 мА с напряжением от 6 до 15 В. Схема сборки позволить не только понять, как работает трекер для солнечных батарей, но и создать его самому.
Чтобы настроить работу схемы, необходимо провести следующие действия:
- Удостовериться в наличия питания на схему.
- Провести подключение двигателя с постоянным током.
- Установить фотоэлементы нужно рядом, чтобы добиться одинакового количества солнечных лучей на них.
- Необходимо выкрутить два подстроечных резистора. Сделать это нужно против часовой стрелки.
- Запускается подача тока на схему. Должен включиться двигатель.
- Вкручиваем один из подстроечников до тех пор, пока он не упрется. Помечаем это положение.
- Продолжить вкручивание элемента до тех пор, пока двигатель не начнет крутиться в противоположную сторону. Помечаем и это положение.
- Делим полученное пространство на равные отделы и посередине устанавливаем подстроечник.
- Вкручиваем другой подстроечник до тех пор, пока двигатель не начнет немного дергаться.
- Возвращаем подстроечник немного назад и оставляем в таком положении.
- Для проверки правильности работы можно закрывать участки солнечной батареи и смотреть за реакцией схемы.

Часовой механизм поворота
Устройство часового механизма поворота в основе своей довольное простое. Для того чтобы создать такой принцип работы, нужно взять любые механические часы и соединить их с двигателем солнечной батареи.
Для того чтобы заставить работать двигатель, необходимо установить один подвижный контакт на длинную стрелку механических часов. Второй неподвижный закрепляется на двенадцати часах. Таким образом, каждый час, когда длинная стрелка будет проходить через двенадцать часов, контакты будут замыкаться, и двигатель будет поворачивать панель.
Временной промежуток в один час, выбран исходя из того, что за это время солнечное светило проходит по небу около 15 градусов. Установить еще один неподвижный контакт можно на шесть часов. Таким образом, поворот будет проходить каждые полчаса.
Водяные часы
Данный способ управления поворотным устройством был изобретен одной предприимчивой канадской студенткой лет и отвечает за поворот лишь одной оси, горизонтальной.

Принцип работы также прост и заключается в следующем:
- Солнечная батарея устанавливается в изначальное положение, когда солнечные лучи попадают на фотоэлемент перпендикулярно.
- После этого к одной из сторон цепляют емкость с водой, а к другой стороне цепляют какой-нибудь предмет такого же веса, что и емкость с водой. Дно емкости должно обладать небольшим отверстием.
- Через него вода будет понемногу вытекать из емкости, из-за чего будет уменьшаться вес, а панель будет потихоньку наклоняться в сторону противовеса. Определить размеры отверстия для емкости придется экспериментально.
Данный способ является наиболее простым. К тому же он экономит материальные средства, которые ушли бы на покупку двигателя, как в случае с часовым механизмом. К тому же, провести монтаж поворотного механизма в виде водяных часов можно самостоятельно, даже не обладая какими-либо специальными знаниями.
Видео
Как сделать трекер для солнечной батареи своими руками, вы узнаете из нашего видео.
Источник
Устройство слежения за солнцем
Как известно, КПД солнечной панели максимально при попадании на нее прямых солнечных лучей. Но т.к. солнце постоянно движется по горизонту, то КПД солнечных батарей сильно падает, когда солнечные лучи падают на панель под углом. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем и автоматически поворачивающие солнечную панель для попадания прямых лучей.
В данной статье представлена схема устройства слежения за солнцем или по другому трэкер (Solar Tracker).
Схема трэкера проста, компактна и вы легко сможете собрать ее своими руками. Для определения позиции солнца, используются два фоторезистора. Мотор включен по схеме H-моста (H-bridge), который позволяет коммутировать ток до 500 мА при напряжении питания 6-15В. В темноте, устройство также работоспособно и будет поворачивать моторчик на наиболее яркий источник света.
Принципиальная схема устройства слежения за солнцем
Как видно на рисунке ниже, схема проста до безобразия и содержит микросхему операционного усилителя LM1458 (К140УД20), транзисторы BD139 (КТ815Г, КТ961А) и BD140 (КТ814Г,КТ626В), фоторезисторы, диоды 1N4004 (КД243Г), резисторы и подстроечные резисторы.
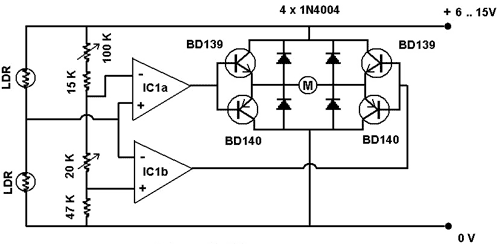
Из схемы видно, что мотор М приводится в движение при разных значениях на выходах ОУ IC1a и IC1b. Таблица истинности:
| Выход IC1a | Выход IC1b | Состояние мотора |
| Низк. | Низк. | |
| Низк. | Выс. | Вперед * |
| Выс. | Выс. | Остановлен |
| Выс. | Низк. | Назад * |
* или наоборот, зависит от подключения мотора
Транзисторы в схеме работают в паре, по диагонали, коммутируя +Ve или -Ve к мотору, и заставляя его вращаться вперед или назад.
Во время остановки мотора, он продолжает вращаться, т.к. присутствует вращающийся момент. Вследствие этого, мотор какое-то время генерирует мощность, которая может вывести транзисторы из строя. Для защиты транзисторов от противоЭДС в схеме моста используется 4 диода.
Входной каскад состоит из двух ОУ (IC1) и фоторезисторов LDR и LDR’. Если количество света, попадающее на них одинаково, то сопротивления фоторезисторов также равны. Следовательно, если напряжение питания 12В, то в месте соединения фоторезисторов LDR LDR’ будет напряжение в 6В. Если количество света попадающего на один фоторезистор будет больше, чем на другом фоторезисторе, то напряжение будет изменяться.
Ограничения (лимиты) от +V до 0V устанавливаются четырьмя последовательно соединенными резисторами и подстраивается 2-мя подстроечными резисторами. Если напряжение выйдет за пределы этих ограничений, то ОУ запустит мотор и он постоянно будет вращаться.
Подстроечный резистор 20K регулируют чувствительность, т.е. диапазон между лимитами. Подстроечник 100К регулирует то, насколько лимиты будут симметричны относительно +V/2 (точка баланса).
Настройка схемы:
1. Проверьте напряжение источника питания схемы
2. Подключите двигатель пост. тока
3. Установите фоторезисторы рядом, чтобы на них попадало одинаковое количество света.
4. Полностью выкрутите оба подстроечный резистора против часовой стрелки
5. Подайте питание на схему. Моторчик закрутиться
6. Вращайте подстроечник 100К по часовой стрелке до тех пор, пока он не остановится. Отметьте эту позицию.
7. Продолжайте вращать подстроечник 100К по часовой стрелке до тех пор, пока мотор не начнет вращаться в другую сторону. Отметьте эту позицию.
8. Разделите угол между двумя позициями пополам и установите там подстроечник (это будет точка баланса).
9. Теперь, вращайте подстроечник 20К по часовой стрелке до тех пор, пока мотор не начнет дергаться
10. Немного верните положение подстроечника назад (против часовой стрелки), чтобы мотор остановился (данный подстроечник отвечает за чувствительность)
11. Проверьте корректность работы схемы, поочередно заслоняя от света один и второй фоторезисторы.
Источник
Двухосевой солнечный трекер на Arduino
Для начала, наверное, стоит рассказать, что в этой статье понимается под солнечным трекером. Коротко говоря, устройство представляет собой подвижную подставку под солнечную панель, нужную, чтобы в условиях наших умеренных широт панель собирала достаточное количество света, меняя своё положение вслед за солнцем.
В данном случае прототип солнечного трекера собирался на базе Arduino. Для вращения платформы в горизонтальной и вертикальной оси используются сервоприводы, угол поворота которых зависит от мощности падающего на фоторезисторы света. В качестве корпуса используется всеми любимый советский металлический конструктор.
Нелишним будет упомянуть, что всё это делалось как курсовой проект, поэтому я не стал заниматься приобретением и креплением собственно, самой солнечной панели и аккумулятора, так как их наличие не имеет отношения к работе трекера. В оправдание могу сказать, что возможности советского металлического конструктора необъятны, так что прикрутить к нему небольшую солнечную панель для зарядки телефона не составит особенного труда, если возникнет такое желание.
Итак, что использовалось при сборке:
- Arduino MEGA 2560 R3
- Сервопривод Tower SG90 — 2x
- Фоторезистор MLG4416 (90mW; 5-10kOhm/1.0MOhm) — 4x
- Звонок пьезоэлектрический KPR-G1750
- Металлический конструктор
- Резистор выводной 10 kOhm; 0,25W; 5% — 4x
- Печатная макетная плата, корпус, шнуры для соединения
Mega использовалась исключительно по причине её наличия в шкафу на момент утверждения темы проекта, если учитывать покупку всех элементов с нуля, то в данном случае вполне себе хватит и Uno, но выйдет, конечно, дешевле.
Внезапно оказавшийся в списке спикер потребовался для пущего эффекта высокотехнологичности. Дело в том, что сервоприводы могут поворачиваться только на 180 градусов, да большего нам и не требуется, при учёте того, что следим мы за солнцем. Но при тестировании работы проекта, когда за солнцем в две минуты демонстрации особо не последишь, оказалось, что неплохо было бы сигнализировать, в какой момент стоит перестать размахивать фонариком, потому что сервопривод достиг мёртвой зоны. Для этого и был добавлен вышеупомянутый звонок.
Итак, начнём собирать трекер. Для начала разделим предстоящий фронт работ на условные четыре этапа: сборка подставки для солнечных панелей и крепление сервоприводов, крепление к собранной конструкции светочувствительных элементов, пайка и написание кода для Arduino.
Фигура первая: конструкторская
Путём интенсивного поиска была найдена парочка примеров конструкции подобных устройств. Наибольшего внимания удостоились два:
- www.youtube.com/watch?v=SvKp3V9NHZY – победитель в номинации «Подача материала» проиграл в надёжности и практичности устройства: конструкция представляет собой соединение двух сервоприводов напрямую.
- www.instructables.com/id/Simple-Dual-Axis-Solar-Tracker — собственно, отсюда и была взята основная идея моей конструкции, за исключением материала и общего внешнего вида поворотного корпуса.
Сборка из металлического конструктора была сопряжена с определёнными трудностями: пришлось подогнать дрелью отверстия для подключения сервоприводов, а также надёжно приклеить их к платформам в двух плоскостях. То, что получилось, показано на видео ниже.
Фигура вторая: схемотехническая
Главной задачей крепления фоторезисторов было даже не их подключение, а обеспечение разделения света для каждого из четырёх элементов. Понятно, что оставить их без каких-нибудь перегородок было нельзя, так как тогда значения, получаемые с фоторезисторов, были бы примерно одинаковы и поворота бы не получилось. Тут, к сожалению, возможности металлического конструктора подвели, главным образом из-за наличия во всех деталях отверстий. Найти подходящей металлической детали не получилось, поэтому мой солнечный трекер обзавёлся инновационной перегородкой из картона. Несмотря на достаточно убогонький вид, своё предназначение она выполняет отлично.
Фоторезисторы к корпусу прикреплены вполне надёжно, единственное, с чем стоило бы поработать – это с аккуратностью их расположения на платформе: сейчас они смотрят вверх недостаточно перпендикулярно, что может расстраивать перфекционистов и слегка портить точность поворота.
Немного схемотехники: подключение светочувствительных элементов осуществляется по схеме делителя напряжения, для чего потребовались указанные в списке элементов выводные резисторы. Все фоторезисторы припаяны к общему контакту, подключенному к пятивольтному выходу питания Arduino. Для удобства и эстетики ноги фоторезисторов припаяны к контактам двух трёхжильных изолированных проводов (один контакт остался неиспользуемым и спрятан). Все схемотехнические детали можно рассмотреть на схеме ниже.


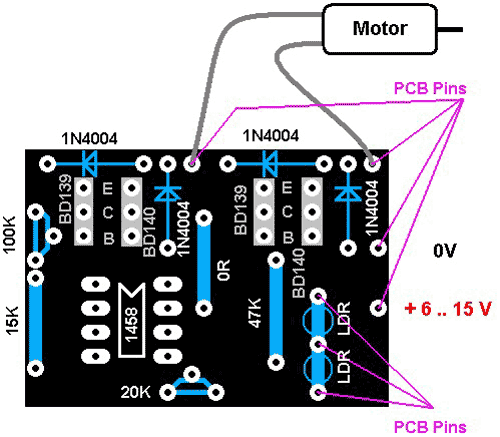
Фигура третья: паяльная
Что-либо подробно описывать тут не несёт особого смысла, поэтому просто прилагаю фото используемых материалов и полученную в результате макетную плату.


Фигура четвёртая: с новым кодом!
Общий алгоритм работы заключается в обработке данных с фоторезисторов при помощи АЦП. Имеем 4 элемента, то есть 4 показания, находим среднее показание по левой стороне ((верхний левый + нижний левый) / 2), аналогично по правой, верхней и нижней сторонам. Если разница по модулю между левой и правой стороной больше порога, то осуществляем поворот в сторону с большим средним значением. Аналогично для верха и низа. Особые плюшки в коде: можно задавать вручную чувствительность срабатывания и максимальный и минимальный угол в двух плоскостях. Листинг рабочего кода приведён ниже.
Источник