ГЕНЕРАТОРЫ НИЗКИХ ЧАСТОТ НА МИКРОСХЕМАХ
Генераторы низких частот предназначены для получения на выходе устройства периодических низкочастотных электрических сигналов с заданными параметрами (форма, амплитуда, частота сигнала).
Микросхема КР1446УД1 (рис. 35.1) представляет собой сдвоенный гай- to-rail ОУ общего назначения. На основе этой микросхемы могут быть созданы устройства разнообразного назначения, в частности, генераторы электрических колебаний, схемы которых приведены на рис. 35.2—35.4 [35.1]. Генератор (рис. 35.2):
♦ одновременно и синхронно вырабатывает импульсы напряжения прямоугольной и пилообразной формы;
♦ имеет единую для обоих ОУ искусственную среднюю точку, образованную делителем напряжения R1 и R2 [35.1].
На первом из ОУ построен интегратор, на втором — триггер Шмитта с широкой петлей гистерезиса (UraCT=UnHT;R3/R5), точными и стабильными порогами переключения. Частота генерации определяется по формуле:
f =———– и составляет для указанных на схеме номиналах 265 Ги. С

Рис. 35.7. Цоколевка и состав микросхемы КР 7446УД7

Рис. 35.2. Схема генератора прямоугольных- треугольных импульсов на микросхеме КР1446УД 7
изменением напряжения питания от 2,5 до 7 В эта частота изменяется не более чем на 1 %.
Усовершенствованный генератор (рис. 35.3) вырабатывает импульсы прямоугольной формы, причем их частота зависит от величины управляющего

Рис. 35.3. Схема управляемого генератора прямоугольных импульсов
входного напряжения по закону
 При изменении
При изменении
входного напряжения от 0,1 до 3 В частота генерации линейно возрастает от 0,2 до 6 кГц [35.1].
Частота генерации генератора прямоугольных импульсов на микросхеме КР1446УД5 (рис. 35.4) линейно зависит от величины приложенного управляющего напряжения и при R6=R7 определяется как:

5 В частота генерации линейно возрастает от 0 до 3700 Гц [35.1].

Рис. 35.4. Схема генератора, управляемого напряжением
-. Так, при изменении входного напряжения от 0,1 до
На основе микросхем TDA7233D, используя в качестве единой основы базовый элемент, рис. 35.5, а, можно собрать достаточно мощные генераторы импульсов (звуковые генераторы), а также преобразователи напряжения, рис. 35.5 [35.2].
Схема генератора (рис. 35.5, 6, верхняя) работает на частоте 1 кГц, которая определяется подбором элементов Rl, R2, Cl, С2. Емкость переходного конденсатора С задает тембр и громкость сигнала.
Схема генератора (рис. 35.5, б, нижняя), вырабатывает двухтональный сигал при условии индивидуального подбора емкости конденсатора С1 в каждом из использованных базовых элементов, например, 1000 и 1500 пФ.
Преобразователи напряжения (рис. 35.5, в) работают на частоте около 13 кГц (емкость конденсатора С1 снижена до 100 пФ):
♦ верхний — вырабатывает отрищ гельное относительно общей шины напряжение;
♦ средний — вырабатывает удвоенное относительно напряжения питания положительное;
♦ нижний — вырабатывает в зависимости от коэффициента трансформации разнополярное равновеликое напряжение с гальванической (при необходимости) развязкой от источника питания.

Рис. 35.5. Схемы нештатного применения микросхем TDA7233D: а – базовый элемент; б — в качестве генераторов импульсов; в — в качестве преобразователей напряжения
При сборке преобразователей следует учитывать, что на диодах выпрямителей теряется заметная часть выходного напряжения. В этой связи в качестве VD1, VD2 рекомендуется использовать диоды Шоттки. Ток нагрузки бестрансформаторных преобразователей может достигать 100—150 мА.
Генератор прямоугольных импульсов (рис. 35.6) работает в диапазонах частот 60—600 Гц\ 0,06—6 кГц; 0,6—60 кГц [35.3]. Для коррекции формы генерируемых сигналов может быть использована цепочка (нижняя часть рис. 35.6), подключаемая к точкам А и В устройства.
Охватив ОУ положительной обратной связью, нетрудно перевести устройство в режим генерации прямоугольных импульсов (рис. 35.7).
Генератор импульсов с плавной перестройкой частоты (рис. 35.8) может быть выполнен на основе микросхемы DA1 [35.4]. При использовании в качестве DA1 1/4 микросхемы LM339 регулировкой потенциометра R3 рабочая частота перестраивается в пределах 740— 2700 Гц (номинал емкости С1 в первоисточнике не указан). Исходная частота генерации определяется произведением C1R6.

Рис. 35.8. Схема широкодиапазонного перестраиваемого генератора на основе компаратора

. Рис. 35.7. Схема генератора прямоугольных импульсов на частоту 200 Гц

Рис. 35.6. Схема НЧ-генератора прямоугольных импульсов
На основе компараторов типа LM139, LM193 и им подобных могут быть собраны:
♦ генератор прямоугольных импульсов с кварцевой стабилизацией (рис. 35.9);
Генератор стабильных по частоте колебаний или так называемый «часовой» генератор прямоугольных импульсов может быть выполнен на компараторе DAI LTC1441 (или ему подобном) по типовой схеме, представленной на рис. 35.10. Частота генерации задается кварцевым резонатором Ζ1 и составляет 32768 Гц. При использовании линейки делителей частоты на 2 на выходе делителей получают прямоугольные импульсы частотой 1 Гц. В небольших пределах рабочую частоту генератора можно понижать, подключая параллельно резонатору конденсатор небольшой емкости.
Обычно в радиоэлектронных устройствах используют LC и RC-генераторы. Менее известны LR-генераторы, хотя на их основе могут быть созданы устройства с индуктивными датчиками,

Рис. 35.11. Схема LR-генератора

Рис. 35.9. Схема генератора импульсов на компараторе LM 7 93

Рис. 35.10. Схема «часового» генератора импульсов
металлоискатели, обнаружители электропроводки, генераторы импульсов и т. д.
На рис. 35.11 приведена схема простого LR-геиератора прямоугольных импульсов, работающего в диапазоне частот 100 Гц — 10 кГц [35.6]. В качестве индуктивности и для звукового
контроля работы генератора используется телефонный капсюль ТК-67. Перестройка частоты осуществляется потенциометром R3.
Генератор работоспособен при изменении напряжения питания от 3 до 12,6 В. При понижении напряжения питания с 6 до 3—2,5 В верхняя частота генерации повышается с 10—11 кГц до 30—60 кГц.
Диапазон генерируемых частот может быть расширен до 7—1,3 МГц (для микросхемы К140УД1А) при замене телефонного капсюля и резистора R5 на катушку индуктивности. В этом случае при отключении диодного ограничителя на выходе устройства можно получить сигналы, близкие к синусоиде. Стабильность частоты генерации устройства сопоставима со стабильностью RC-генераторов.
Простые генераторы звуковых сигналов (рис. 35.12) могут быть выполнены на микросхемах К538УНЗ [35.7]. Для этого достаточно вход и выход микросхемы соединить конденсатором или его аналогом — пьезокерамическим капсюлем. В последнем случае капсюль выполняет также роль звукоизлучагеля.
Частоту генерации можно менять, подбирая емкость конденсатора. Параллельно или последовательно пьезокерамическому капсюлю для подбора оптимальной частоты генерации можно включить конденсатор. Напряжение питания генераторов 6—9 В.

Рис. 35.72. Генераторы звуковых частот на микросхеме
Для экспресс-проверки ОУ может быть использована схема генератора звуковых сигналов, представленная на рис. 35.13 [35.8]. Тестируемую микросхему DA1 типа К140УД6, К140УД7, К140УД608у К140УД708 или иных, имеющих аналогичную цоколевку, вставляют в панельку, после чего включают питание. В случае, если микросхема исправна, пьезокерамический капсюль НА1 излучает звуковой сигнал.

Рис. 35.13. Схема звукового генератора — испытателя ОУ

Рис. 35.14. Схема генератора прямоугольных импульсов на ОУКР1438УН2

Рис. 35.15. Схема генератора синусоидальных сигналов на ОУКР1438УН2
Генератор сигналов прямоугольной формы на частоту 1 кГц, выполненный на микросхеме КР1438УН2, показан на рис. 35.14 [35.9]. Генератор стабилизированных по амплитуде синусоидальных сигналов на частоту 1 кГц приведен на рис. 35.15 [35.9].
Схема генератора [35.10], вырабатывающего сигналы синусоидальной формы, представлена на рис. 35.16. Этот генератор работает в диапазоне частот 1600—5800 Гц, хотя при частотах свыше 3 кГц форма сигнала все более отдаляется от идеала, а амплитуда выходного сигнала падает на 40 %. При десятикратном увеличении емкостей конденсаторов С1 и С2 полоса перестройки генератора с сохранением синусоидальной формы сигнала понижается до 170—640 Гц при неравномерности амплитуды до 10 %.

Рис. 35.7 7. Схема генератора синусоидальных колебаний на частоту 400 Гц

Рис. 35.76. Схема генератора синусоидального напряжения
Схема генератора синусоидальных колебаний, работающего на фиксированной частоте, показана на рис. 35.17 [35.11].
Рабочая частота генератора определяется номиналами элементов СЗ—С5 и R4—R6. Для указанных на схеме номиналах генератор работает на частоте 400 Гц. Выходной сигнал на выводе 6 микросхемы DA1 достигает 0,5 В. Резистивным делителем R7 и R8 уровень выходного напряжения устройства регулируется в пределах от 0 до 25 мВ.

Рис. 35.18. Схема НЧ-генератора синусоидальных сигналов
Генератор синусоидальных сигналов (рис. 35.18), работающий на фиксированной частоте 1,1 кГц, выполнен на микросхеме К140УД2. Хотя
в этом качестве можно использовать практически любую микросхему аналогичного назначения [35.12]. Для перестройки частоты генерации последовательно с резисторами R4 и R5 следует включить сдвоенный потенциометр. Ступенчато частоту генерации можно изменять, переключая емкости конденсаторов С2 и СЗ.
Рабочая частота генератора определяется по формуле где
где
/— в Гц\ R — в Ом; С — в Ф. Конденсаторы СЗ—СЮ — керамические.

Рис. 35.19. Схема многодиапазонного генератора синусоидальных сигналов
Четырехдиапазонный генератор синусоидальных колебаний на основе моста Вина выполнен на операционном усилителе СА3240 фирмы Harris Semiconductor, рис. 35.19 [35.13]. Эта микросхема отличается исключительно высоким входным сопротивлением (1,5 ТОм) и способна работать до частоты 4,5 МГц. Микросхема предназначена для замены распространенной микросхемы 741 (отечественный аналог К140УД6, К140УД7).
Генератор синусоидальных сигналов с плавной перестройкой рабочей частоты может быть выполнен по схеме, представленной на рис. 35.20 [35.14]. Выходное напряжение генератора в диапазоне частот 50 Гц —100 кГц составляет 2,5 В. При напряжении питания 12 В устройство потребляет ток до 20 мА. Коэффициент гармоник не превышает 0,02 %.
В мостовом генераторе (рис. 35.21) при выполнении условия R1=R2=R и С1=С2=С при R3=R4=R5 частота выходного сигнала синусоидальной формы
определяется из выражения f = г Д е / в кГц, R — в кОм, С ■

Рис. 35.20. Схема перестраиваемого генератора низкочастотных синусоидальных колебаний

Рис. 35.21. Схема мостового генератора синусоидальных сигналов
При R=1 кОм и С=0,1 мкФ частота генерируемого сигнала равна 1 кГц. Амплитуду выходного сигнала регулируют подбором номинала резистора R3 [35.15].
Шустов М. А., Схемотехника. 500 устройств на аналоговых микросхемах. — СПб.: Наука и Техника, 2013. —352 с.
Источник
Частотный привод 5-200 Гц (10-400 Гц)
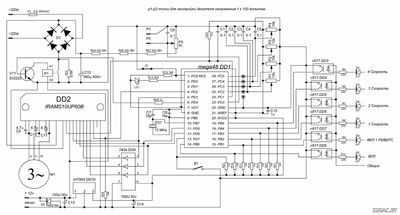
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200 Гц
- Скорость набора частоты 5-50 Гц в секунду
- Скорость снижения частоты 5-50 Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200 Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750 вт, но крутит и 1.1 кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса :
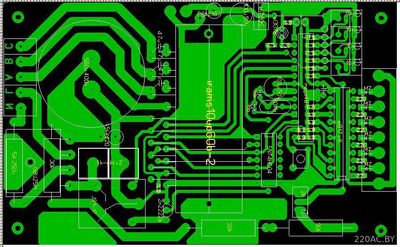
Проект в layout
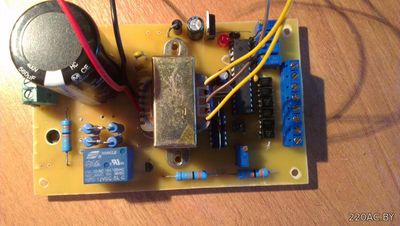
Ниже фото того, что у меня получилось
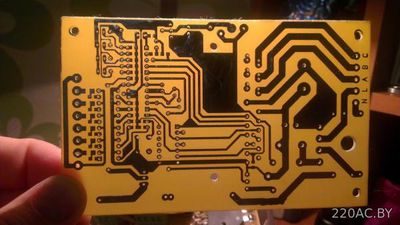
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа).
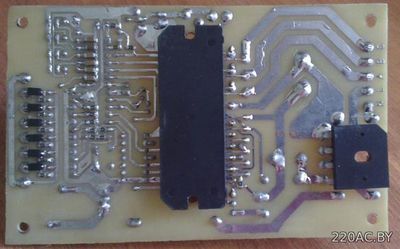
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220 В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220 в 50 Гц). Скорость набора частоты установлена на уровне 15 Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100 Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200 Гц., 1v-40 Гц, 1.25v-50 Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки масштабирования напряжения DC звена 1 в -100 в (на схеме R30).

Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО. На этом настройка завершена.
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220 В и частотой 50 Гц), так и для двигателя с напряжением 380 в и частотой 50 гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220 в 50 Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того . светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220 В — 50 Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220 В- 30 Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200 Гц /220 то резистор нужно выкрутить на максимум; если написано 100 Гц/ 220 в нужно добиться 2.5 Вольта на 1-ом контакте. (1 Вольт на первом контакте соответствует 40 Гц); если на двигателе написано 50 Гц/400 В то нужно выставить 27 Гц/0,68 В (например:(50/400)*220=27 Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25 Гц — 200 Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать. Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220 в 50 Гц с вольт добавкой в 10 % .
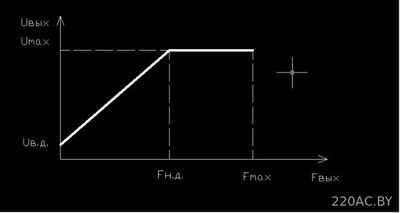
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220 В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50 Гц , номинальное напряжение 80 В, Чтобы узнать какая будет номинальная частота при 220 В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137 Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50 Гц одной фазы (на 3-х фазах зависает комп )
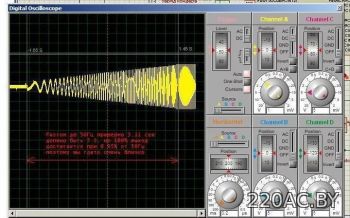
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50 Гц 220 В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 кВт.
Главное у данного модуля: ток короткого замыкания 140 А против 47 А, защита настроена на уровне 25 А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000 мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10 мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20 МГц, то привод получится 10-400 Гц; темп разгона 10-100 Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380 В 50 Гц, а настройки для 220 В 50 Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
Источник