- Создаем руку робота и контроллер-манипулятор
- Что хотим получить
- Комплектующие
- Схема соединения
- Делаем руку робота
- Код Ардуино
- Робот-манипулятор на Arduino
- Общее описание проекта робота-манипулятора
- Основные узлы для проекта манипулятора
- Сборка механической части
- Схват манипулятора
- Добавление подсветки на манипулятор
- Электросхема
- Программирование и первый запуск
- Программа управления и пояснения к ней
- Скетч с использованием ультразвукового датчика расстояния
- Arduino: Робо-рука на двух сервоприводах
- Стояли такие задачи:
- ***ВИДЕО***
Создаем руку робота и контроллер-манипулятор
В этом небольшом уроке для начинающих мы создадим устройство-контроллер и руку робота для разных целей.
Что хотим получить
Мы в этом скромном уроке мы сделаем контроллер, который будет зеркально управлять рукой робота. Такие полезные технические решения могут применяться в различных областях и несут в себе огромную пользу.
Часто подобными устройствами пользуются, например, военные при разминировании различных взрывных устройств.
Также, вполне возможно, что такого рода проекты могут дать толчек в развитии обучения искусственного интеллекта, когда робот обучается на основе действий человека, а после может сам повторять и применять полученные навыки.
Комплектующие
Ниже перечислим комплектующие, используемые в проекте:
- Arduino UNO
- Сервоприводы MG995
- Сервоприводы DS3115
- Поворотные потенциометры, 10 кОм
Рука робота использует три обычных сервопривода ШИМ, а каждый угол управляется переменным резистором. Два серводвигателя DS3115 используются в вертикальном направлении, а сервопривод MG995 используется при вращении.
Схема соединения
Соединяем все комплектующие согласно схеме ниже.

Делаем руку робота

Мы делаем корпус контроллера на 3D-принтере. Скачать файлы .stl можно в архиве ниже:

Предусмотрены отверстие и позиционирующее отверстие для завинчивания ручки поворотного потенциометра, а также выемка для вставки ручки.

Соберите вместе изготовленные детали и три поворотных потенциометра.
Поворотный потенциометр теперь расположен в том же направлении, что и ось вращения серводвигателя манипулятора робота.
Код Ардуино
Этот простой код ниже просто считывает значение вращающегося потенциометра с помощью аналогового пина, преобразует его в угол и передает на соответствующий сервопривод.
В завершение подключите поворотный потенциометр и подключите всё к Arduino.
Источник
Робот-манипулятор на Arduino
Создаем робот-манипулятор с использованием дальномера, реализуем подсветку.
Резать основание будем из акрила. В качестве двигателей используем сервопривода.
Общее описание проекта робота-манипулятора
В проекте использовано 6 серводвигателей. Для механической части использован акрил толщиной 2 миллиметра. В качестве штатива пригодилось основание от диско-шара (один из двигателей вмонтирован внутрь). Также использован ультразвуковой датчик расстояния и светодиод диаметром 10 мм.
Для управления роботом используется Arduino плата питания. Сам источник питания — блок питания компьютера.
В проекте изложены исчерпывающие пояснения по разработке робо-руки. Отдельно рассмотрены вопросы питания разработанной конструкции.



Основные узлы для проекта манипулятора
Давайте начнем разработку. Вам понадобятся:
- 6 серводвигателей (я использовал 2 модели mg946, 2 mg995, 2 futuba s3003 (mg995/mg946 по характеристикам лучше, чем futuba s3003, но последние намного дешевле);
- акрил толщиной 2 миллиметра (и небольшой кусок толщиной 4 мм);
- ультразвуковой датчик расстояния hc-sr04;
- светодиды 10 мм (цвет — на ваше усмотрение);
- штатив (используется в качестве основания);
- схват аллюминиевый (стоит около 10-15 долларов).
- Плата Arduino Uno (в проекте использована самодельная плата, которая полностью аналогична Arduino);
- плата питания (вам придется ее сделать самим, к этому вопросу мы вернемся позже, он требует отдельного внимания);
- блок питания (в данном случае используется блок питания компьютера);
- компьютер для программирования вашего манипулятора (если вы используете для программирования Arduino, значит, среда Arduino IDE)
Конечно же, вам пригодятся кабели и некоторые базовые инструменты вроде отверток и т.п. Теперь мы можем перейти к конструированию.
Сборка механической части



Перед началом разработки механической части манипулятора, стоит отметить, что чертежей у меня нет. Все узлы делались «на коленке». Но принцип очень простой. У вас есть два звена из акрила, между которыми надо установить серводвигатели. И другие два звенья. Тоже для установки двигателей. Ну и сам схват. Подобный схват проще всего купить в интеренете. Практически все устанавливается с помощью винтов.
Длина первой части около 19 см; второй — около 17.5; длина переднего звена около 5.5 см. Остальные габариты подбирайте в соответсвии с размерами вашего проекта. В принципе, размеры остальных узлов не так важны.
Механическая рука должна обеспечивать угол поворота 180 градусов в основании. Так что мы должны установить снизу серводвигатель. В данном случае он устанавливается в тот самый диско-шар. В вашем случае это может быть любой подходящий бокс. Робот устанавливается на этот серводвигатель. Можно, как это показано на рисунке, установить дополнительное металлическое кольцо-фланец. Можно обойтись и без него.
Для установки ультразвукового датчика, используется акрил толщиной 2 мм. Тут же снизу можно установить светодиод.
Детально объяснить как именно сконструировать подобный манипулятор сложно. Многое зависит от тех узлов и частей, которые есть у вас в наличии или вы приобретаете. Например, если габариты ваших сервоприводов отличаются, звенья арма из акрила тоже изменятся. Если изменятся габариты, калибровка манипулятора тоже будет отличаться.
Вам точно придется после завершения разработки механической части манипулятора удлинить кабели серводвигателей. Для этих целей в данном проекте использовались провода из интернет-кабеля. Для того, чтобы все это имело вид, не поленитесь и установите на свободные концы удлиненных кабелей переходники — мама или папа, в зависимости от выходов вашей платы Arduino, шилда или источника питания.
После сборки механической части, мы можем перейти к «мозгам» нашего манипулятора.
Схват манипулятора




Для установки схвата вам понадобится серводвигатель и несколько винтов.
Итак, что именно необходимо сделать.
Берете качалку от сервы и укорачиваете, пока она не подойдет к вашему схвату. После этого закручиваете два маленьких винта.
После установки сервы, проворачиваете ее в крайнее левое положение и сжимаете губки схвата.
Теперь можно установить серву на 4 болта. При этом следите, чтобы двигатель был все так же в крайнем левом положении, а губки схвата закрыты.
Можно подключить сервопривод к плате Arduino и проверить работоспособность схвата.
Учтите, что могут возникнуть проблемы с работой схвата, если болты/винты слишком сильно затянуты.
Добавление подсветки на манипулятор

Можно сделать ваш проект ярче, добавив на него подсветку. Для этого использовались светодиоды. Делается несложно, а в темноте выглядит очень эффектно.
Места для установки светодиодов зависят от вашего креатива и фантазии.
Электросхема





Можно использовать вместо резистора R1 потенциометр на 100 кОм для регулировки яркости вручную. В качестве сопротивлени R2 использовались резисторы на 118 Ом.
Перечень основных узлов, которые использовались:
- R1 — резистор на 100 кОм
- R2 — резистор на 118 Ом
- Транзистор bc547
- Фоторезистор
- 7 светодиодов
- Переключатель
- Подключение к плате Arduino
В качестве микроконтроллера использовалась плата Arduino. В качестве питания использовался блок питания от персонального компьютера. Подключив мультиметр к красному и черному кабелям, вы увидите 5 вольт (которые используются для серводвигателей и ультразвукового датчика расстояния). Желтый и черный дадут вам 12 вольт (для Arduino). Делаем 5 коннекторов для сервомоторов, параллельно подключаем позитивные к 5 В, а негативные — к земле. Аналогично с датчиком расстояния.
После этого подключите оставшиеся коннекторы (по одному с каждой сервы и два с дальномера) к распаянной нами плате и Arduino. При этом не забудьте в программе в дальнейшем корректно указать пины, которые вы использовали.
Кроме того, на плате питания был установлен светодиод-индикатор питания. Реализуется это несложно. Дополнительно использовался резистор на 100 Ом между 5 В и землей.
10 миллиметровый светодиод на роботе тоже подключен к Arduino. Резистор на 100 Ом идет от 13 пина к к позитивной ноге светодиода. Негативный — к земле. В программе его можно отключить.
Для 6 серводвигателей использовано 6 коннекторов, так как 2 серводвигателя снизу используют одинаковый сигнал управления. Соответствующие проводники соединяются и подключаются к одному пину.
Повторюсь, что в качестве питания используется блок питания от персонального компьютера. Либо, конечно, вы можете приобрести отдельный источник питания. Но с учетом, того, что у нас 6 приводов, каждый из которых может потреблять около 2 А, подобный мощный блок питания обойдется недешево.
Обратите внимание, что коннекторы от серв подключаются к ШИМ-выходам Arduino. Возле каждого такого пина на плате есть условное обозначение
. Ультразвуковой датчик расттояния можно подключить к пинам 6, 7. Светодиод — к 13 пину и земле. Это все пины, которые нам понадобятся.
Теперь мы можем перейти к программированию Arduino.
Перед тем как подключить плату через usb к компьютеру, убедитесь, что вы отключили питание. Когда будете тестировать программу, также отключайте питание вашей робо-руки. Если питание не выключить, Arduino получит 5 вольт от usb и 12 вольт от блока питания. Соответственно, мощность от usb перекинется к источнику питания и он немного «просядет».
На схеме подключения видно, что были добавлены потенциометры для управления сервами. Потенциометры не являются обязательным звеном, но приведенный код не будет работать без них. Потенциометры можно подключить к пинам 0,1,2,3 и 4.
Программирование и первый запуск
Для управления использовано 5 потенциометров (вполне можно заменить это на 1 потенциометр и два джойстика). Схема подключения с потенциометрами приведена в предыдущей части. Скетч для Arduino находится здесь.
Снизу представлены несколько видео робота-манипулятора в работе. Надеюсь, вам понравится.
На видео сверху представлены последние модификации арма. Пришлось немного изменить конструкцию и заменить несколько деталей. Оказалось, что сервы futuba s3003 слабоваты. Их получилось использовать только для схвата или поворота руки. Так что виесто них были установлены mg995. Ну а mg946 вообще будут отличным вариантом.
Программа управления и пояснения к ней
// управляются привода с помощью переменных резисторов — потенциометров.
int potpin = 0; // аналоговый пин для подключения потенциометра
int val; // переменная для считывания данных с аналогового пина
val = analogRead(potpin); // считывает значение потенциометра (значение между 0 и 1023)
val = map(val, 0, 1023, 0, 179); // масштабирует полученное значение для использования с сервами (получаем значение в диапазоне от 0 до 180)
myservo1.write(val); // выводит серву в позицию в соответствии с рассчитанным значением
delay(15); // ждет, пока серводвигатель выйдет в заданное положение
val = analogRead(potpin1); // серва 2 на аналоговом пине 1
val = map(val, 0, 1023, 0, 179);
val = analogRead(potpin2); // серва 3 на аналоговом пине 2
val = map(val, 0, 1023, 0, 179);
val = analogRead(potpin3); // серва 4 на аналоговом пине 3
val = map(val, 0, 1023, 0, 179);
val = analogRead(potpin4); //серва 5 на аналоговом пине 4
val = map(val, 0, 1023, 0, 179);
Скетч с использованием ультразвукового датчика расстояния
Это, наверное, одна из самых эффектных частей проекта. На манипулятор устанавливается датчик расстояния, который реагирует на препятствия вокруг.
Основные пояснения к коду представлены ниже
#define trigPin 7
#define echoPin 6
Мы добавили в наш код серводвигатели, светодиод и датчик расстояния. Здесь изменять ничего не надо.
Следующий кусок кода:
Мы присвоили всем 5-ти сигналам (для 6 приводов) названия (могут быть любыми)
Источник
Arduino: Робо-рука на двух сервоприводах
Никогда раньше не имел дело с микроконтроллерами, поэтому решил начать своё знакомство с Ардуино. Понадобились базовые знания С/C++ и немного электроники.
Цель: “При помощи Arduino Uno и двух сервоприводов (9g SG90 Mini Micro Servo) написать на листе бумаги любое словосочетание” 
Стояли такие задачи:
1) Установить среду разработки под Linux Fedora, получилось не сразу, но долго мучиться не пришлось. Был баг с поискам “Serial Port”, но гугл и терпение сделали свое дело.
2) Разобраться в том, что же такое за чудо сервопривод, в народе “серва”. Так как изначально у меня были сервы с вращением против часовой стрелки, весь код писался под них, но когда пришло время поменять их на новые “дешёвые” SG90, вдруг обнаружилось, что новые вращаются по часовой стрелке! Проблема решается просто: при помощи паяльника, меняются местами провода: на двигателе, и крайние (1ый и 3ий) провода на потенциометре. 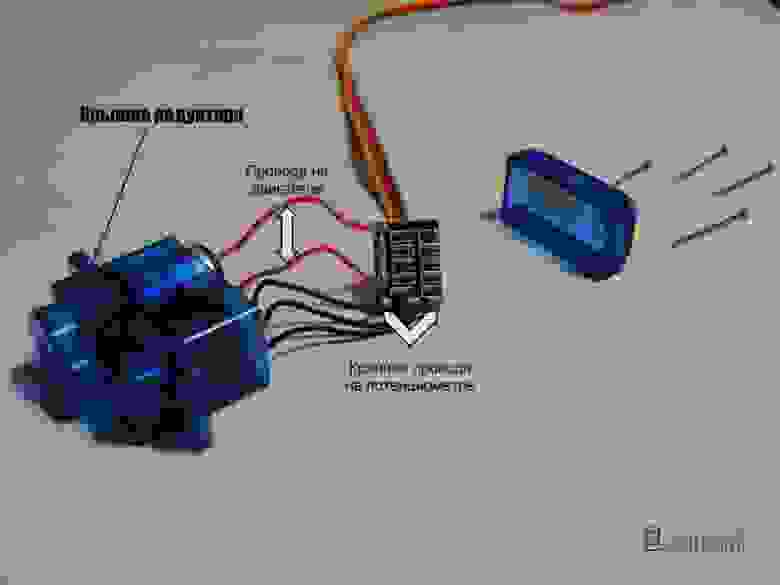
3) Собрать техническую конструкцию “руки”, название “рука” звучит конечно громко, но главное чтобы отличалось от “плоттера”.
Для этого:
• Обзавелся макетной платой и горсткой проводов из витой пары, на оба конца провода я припаял ножки от старых электронных компонентов, в моем случае я пожертвовал конденсаторами.
• Выпилил из гетинакса, найденном на помойке радиозавода в 90-х, “плечо” и “предплечье”, их длина 80мм, а расстояние от крепления к серве до другого крепления и стержня 50мм. 
• Для выведения каракуль сначала использовал стержень от гелевой ручки, но за тонкой линией сложно было скрыть мелкие подёргивания серв, остановился на варианте с фломастером.
• Закрепил первую “серву” в металлической банке.
Всё, конструкция готова, но к сожалению без программной начинки она только немного вздрагивает при подаче питания на Ардуину. 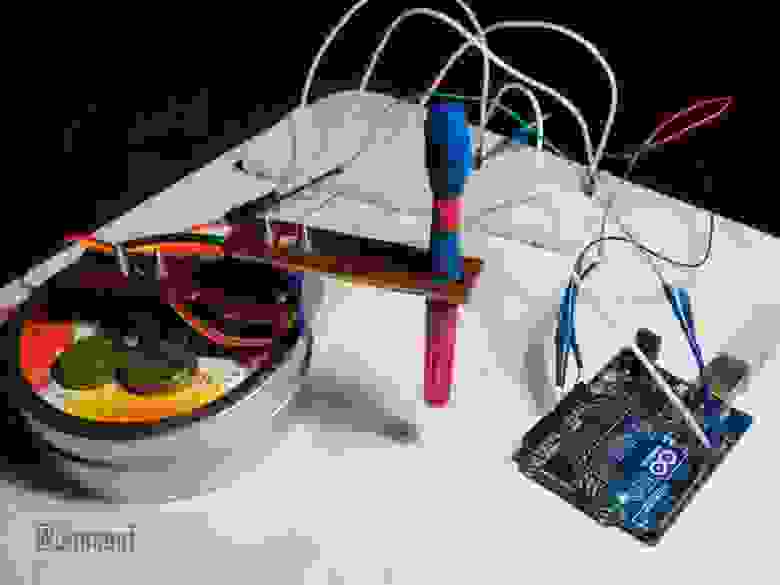
4) Программирование:
- Как полагается, на бумажке, я вывел две небольшие формулы определения углов поворота для “серв” по заданной координате (X,Y). Точкой отсчета (0;0) — служит крепление плеча к первому сервоприводу.

- После череды экспериментов, я понял, что до конца моей задумки еще далеко, а сервоприводы, с каждым моим багом, всё страдали и страдали от бестолковых значений переменных. Поэтому было принято решение писать сначала визуализированную модель в graphics.h старого доброго BorlandC. Кому интересно, что я там свизуализировал, пишите лично.
- Теперь, уже не опасаясь за сохранность имущества я продолжал писать код.
С помощью миллиметровой бумаги откалибровал систему определения координат и перешел к рисованию прямых линий, так как задумывалось именно линиями создавать шрифт для букв. Выглядит это так:


Скажу одно, что создавал их не зря, так как код уменьшился с 600 строк до 60, а это визуально приятней! Правда, созданием библиотек я увеличил вес скетча на 2Кб, 6% — ощутимо!
Компиляция прошла успешно! Боялся за память на Arduino и не зря, несмотря на то что в Uno 32Kb, скетч размером больше 29 не пройдет, так как 3Kb заняты загрузчиком:
Binary sketch size: 29972 bytes (of a 32256 byte maximum)
Немного переписав букву ”R” через “P”, и “Q” через “O”, уменьшил вес и все заработало как надо!
Binary sketch size: 28468 bytes (of a 32256 byte maximum)
***ВИДЕО***
30$) + 2x “Micro Servo SG90”(
3$) Итого: 36$ + риски, мало ли “Почта России” не донесёт!
Макетную плату мне одолжили, она кое-где идет в комплекте с Arduino. Плата освобождает от пайки, но и без неё легко можно обойтись.
6) Вывод: Получился интересный девайс, которым можно: удивить гостей, портить похабными надписями важные документы, пугать кота, подписывать документы (добавив предварительно свою подпись в библиотеку), рисовать.
Я познакомился с Arduino, увидел много креативных идей, понял, что надо бы изучить Assembler.
Если не потеряю интерес, то закажу Arduino Ethernet Shield и сделаю, чтобы “рука” писала Твиттер-имя человека приславшего мне Reply.
7) Если бы я начинал что-то подобное сейчас, чтобы сделал по-другому?
1) Не парился бы с графической моделью руки в graphics.h, а использовал бы “Google Sketchup + plugin SketchyPhysics“
2) Для создания конструкции модели использовал бы “поликапролактон”.
Надеюсь, мой опыт окажется кому-то полезным, ведь это так здорово, когда своим трудом и идеями оживляешь «неоживляемое»! Удачи!
Источник