Как сделать «робота» уборщика своими руками

Всем доброго времени суток дорогие друзья! В сегодняшней статье я бы вам хотел показать и рассказать об довольно занятной идее самоделки. Данная самоделка неплохо подходит для дома, гаража с гладкими полами, да и просто для занятия своего времени. В общем сегодня рассмотрим как сделать очень простого «робота» уборщика на проводном управлении. Конечно проводное управление не очень удобно, но в данном случае, одновременно удобно и дёшево, если разбираетесь хоть немного в электронике и умеете заказывать товары из Китая, то думаю вам не составит труда перевести данный агрегат на беспроводное управление. Но минус беспроводного управления в том, что придётся использовать мощный аккумулятор, который не у всех есть и не многий его себе могут позволить, а два куска провода могут валяться почти у каждого.
Ну что ж, думаю хватит длинных предисловий, погнали!
И так, для просто «робота» уборщика нам понадобится:
-два больших пластиковых контейнера
-7 мощных электрических двигателей на 12В, с резьбовой фиксацией
-гайки фиксации для двигателей
-много проводов
-4 колеса под моторы, заказать можно всё на том же AliExpress
-тонкая фанера
-специальные «губки»-салфетки для чистки различных покрытий в вашем доме
-два компьютерных кулера, вот кстати ссылка на неплохие
-водопроводные ПВХ трубки и тройник для них, а также металлические крепления и механический кран для воды
-двойные выключатели
-кнопка
-небольшой контейнер
-блок питания на 12 В
-переходник для блока питания
Из инструментов нам также понадобится:
-паяльник
-термоклей
-электрический или обычный лобзик
-канцелярский нож
И так, приступим.
Первым делом необходимо взять большой пластиковый контейнер и на одной из его сторон начертить с помощью маркера или гелиевой ручки начертить прямоугольник, со сторонами 7 на 14 см, ни чего сложного, ну а затем, просто вырезаем с помощью канцелярского ножа. После чего, разогреваем паяльник и делаем несколько сквозных, не толстых отверстий, там же, где на фото ниже:





Возьмём электрические моторы, и установим их на свои места, то-есть вставляем ось каждого мотора в боковые отверстия и фиксируем с помощью гайки. Провода от каждой пары моторов, скручиваем в косичку для удобства.
Теперь берём ещё три мотора, и также устанавливаем их в свои пазы, точно так же, как и на фото ниже. Провода тоже скручиваем в косичку для удобства.
Надеваем большие колёса на оси вращения двигателей и тоже фиксируем их, они должны стоять ровно:











С помощью электрического или обычного лобзика, вырезаем два фанерных круга, с отверстиями ровно по центру.
Берём салфетки для чистки поверхностей, прикладываем одну из них к фанерному кругу, обводим и вырезаем, после чего приклеиваем круг из салфетки к фанерному:



Все провода конструкции необходимо спять в единую (ну почти) схему. Кулера припаиваем к трём двигателем, которые торчат из дна контейнера, а также спаиваем боковые моторы — правый с правым, а левый с левым. Не забываем про изоляцию контактов с помощью термоусадки или изоленты.
Припаиваем ещё 6 проводов к остальным, а точнее, для начала сматываем по два в косичку. Одну косичку припаиваем к контактам одной стороны моторов, а другую к другой стороне. Оставшиеся два провода припаиваем к соединению кулеров и нижних моторов. В общем делаем всё так, как и на фото ниже:



Теперь займемся сантехникой.
Необходимо разделить одну короткую ПВХ трубу на две равные части и просверлить на одной из сторон по несколько отверстий, не очень толстых и только на одной стороне. Подготавливаем все материалы, и начинаем их соединять. В принципе тут ничего сложного нет и достаточно просто делать всё так, как и на фото ниже, поэтому мои комментарии здесь излишни, просто собираем.
В итоге получается простой дозатор-разбрызгиватель для воды, чтобы «робот» лучше мыл пол:










Теперь приступим к изготовлению пульта управления для данного «робота» уборщика.
Возьмём небольшой контейнер и начертим по бокам два прямоугольника под выключатели и один круг по центру под кнопку. После чего вырезаем их.
Затем берём кнопки и спаиваем их контакты проводами, как на фото ниже, вставляем в отверстия под них. Так же вставляем и кнопку, с припаянными к ней проводами, выключатели соединяем между собой. Берём разъём под блок питания на 12 вольт и тоже припаиваем его к выключателям:













Подключаем пульт к моторам и кулерам, подключаем 12В, приклеиваем к нижним моторам два фанерных круга с салфетками для очистки, а на передний мотор — просто губку. Устанавливаем большой контейнер с сантехникой и всё! Простой «робот» уборщик готов и осталось только его протестировать!
Для этого, просто берём пульт управления, запускаем всю конструкцию с помощью кнопки и начинаем управлять «роботом» уборщиком, чистя при этом гладкий пол.
А да, конечно же необходимо не забыть налить в контейнер с сантехникой немного воды и моющего средства и открыть кранчик, так, чтобы вода немного капала, но не очень сильно.
Вообще, данная самоделка и так очень забавная и интересная, но есть множество вариантов, как её усовершенствовать, к примеру, как я уже и говорил, перевести её на беспроводное управление или тип того. Пишите свои варианты в комментарии.
Для занятия досуга, данная самоделка отлично подходит.








Источник
Как сделать робот-пылесос своими руками — 2 идеи сборки


В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку. Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Самодельный робот-пылесос должен определять столкновения со стенами и мебелью. Для этого нужно предусмотреть датчики препятствия и концевые выключатели на «бампере». Также нужен сам рабочий орган – пылесос. При этом он должен быть рассчитан на работу от постоянного тока низкого напряжения (например, 12В).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
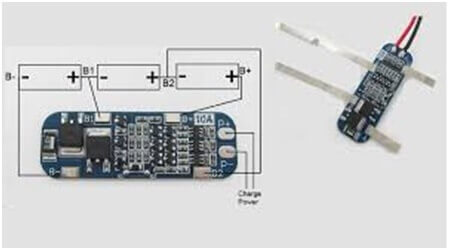
- Аккумуляторы и контроллер заряда.
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.
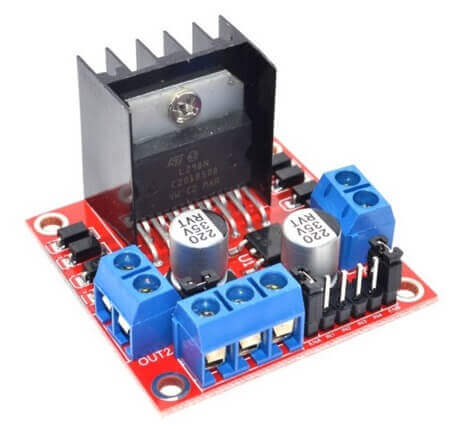
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
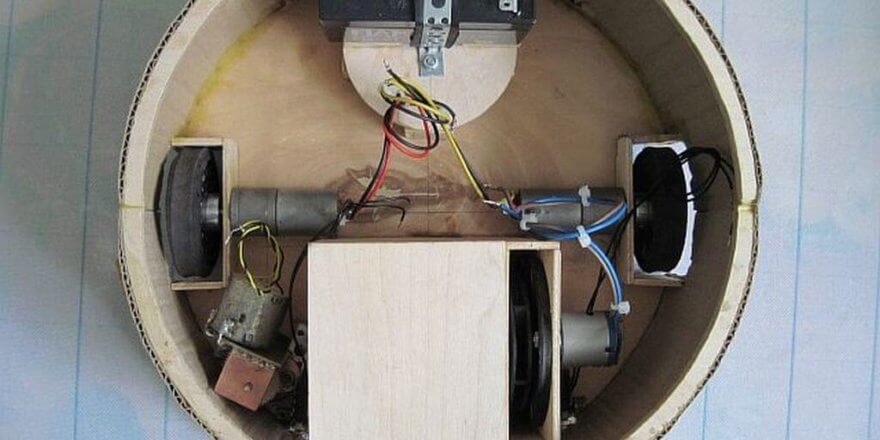
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.


Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
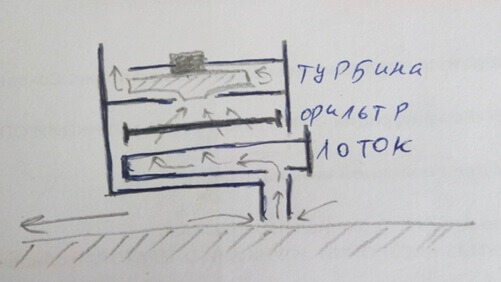
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.

Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
Идея №2: почти заводской робот
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
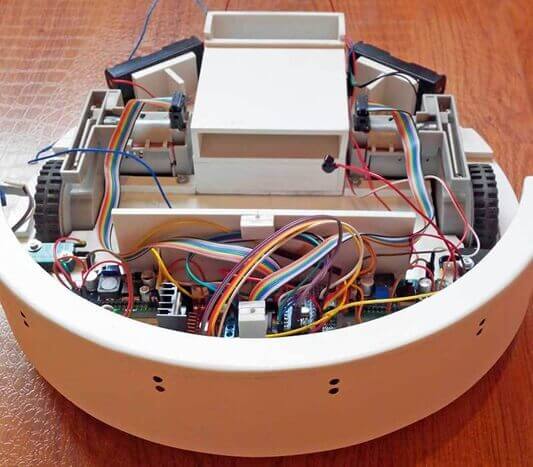
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
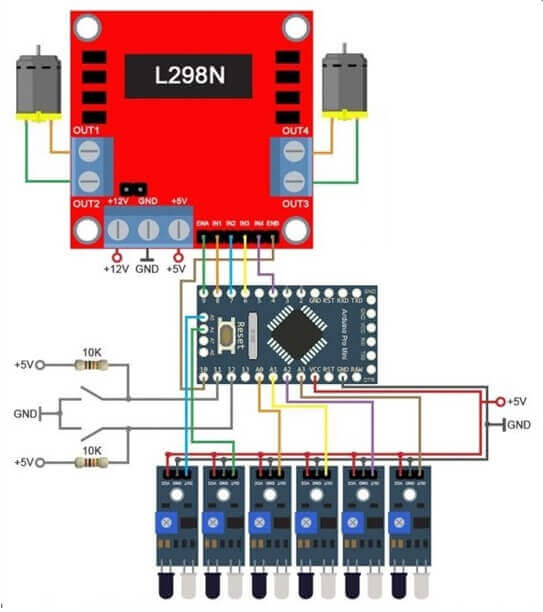
Схема сборки робота-пылесоса
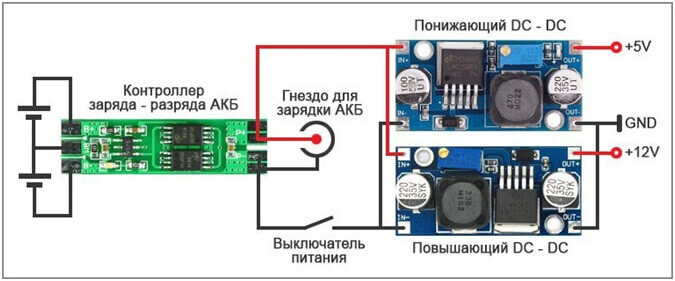
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.


Вот схема питания этого робота:
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
Источник