ПОСЛУШНЫЙ ВИНТ
Многие читатели, строящие аэросани и глиссеры с воздушными винтами, в своих письмах в редакцию просят рассказать, как устроены винты изменяемого шага и какими преимуществами они обладают. Выполняя эту просьбу, публикуем материал, подготовленный консультантом общественного КБ «М-К» по снегоходной технике И. Н. Ювенальевым.
Тяговое усилие, развиваемое любым винтом, зависит от его диаметра, скорости вращения, угла атаки лопастей по отношению к плоскости вращения и от профиля поперечного сечения лопасти, создающего подъемную силу. Вот пример.
Поместим в воздушный поток иод некоторым углом атаки плоскую пластинку (рис. 1А). Набегающий поток давит на ее нижнюю поверхность с силой Р1. Одновременно на верхней поверхности из-за несимметричности обтекания воздушный поток завихряется, возникает разрежение, создающее силу Р2. Эти силы направлены в одну сторону, действуют перпендикулярно плоскости пластины и приложены в ее геометрическом центре. Они могут быть заменены одной — равнодействующей силой Р. Если же последнюю разложить на вертикальную и горизонтальную составляющие, то получим соответственно подъемную силу Т (или тягу) и силу сопротивления воздуха X.
Величина интересующей нас силы Т зависит от угла атаки и скорости, с которой пластина движется в потоке.
Если рассматривать соотношение сил Т и X в зависимости от угла атаки при постоянной скорости, то окажется, что сопротивление постепенно увеличивается и достигает максимума при вертикальном положении пластины. Сила же тяги сначала растет (до наивыгоднейшего для данной скорости движения угла атаки), а затем резко уменьшается. Следовательно, для каждой скорости может быть только одни наивыгоднейший угол атаки.
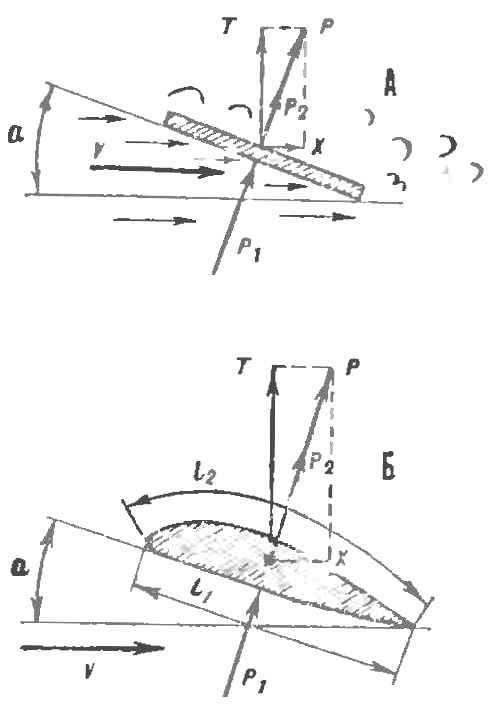
Рис. 1. Силы, действующие на прямую пластинку и аэродинамический профиль при движении в воздушном потоке:
V — скорость набегающего потока, X — сила сопротивления воздуха, а — угол атаки, Р1 — сила давления, Р2 — сила разрежения, Р — равнодействующая, Т — сила тяги, нлн подъемная сила, I2 — длина верхней части профиля, I1 — длина нижней части.
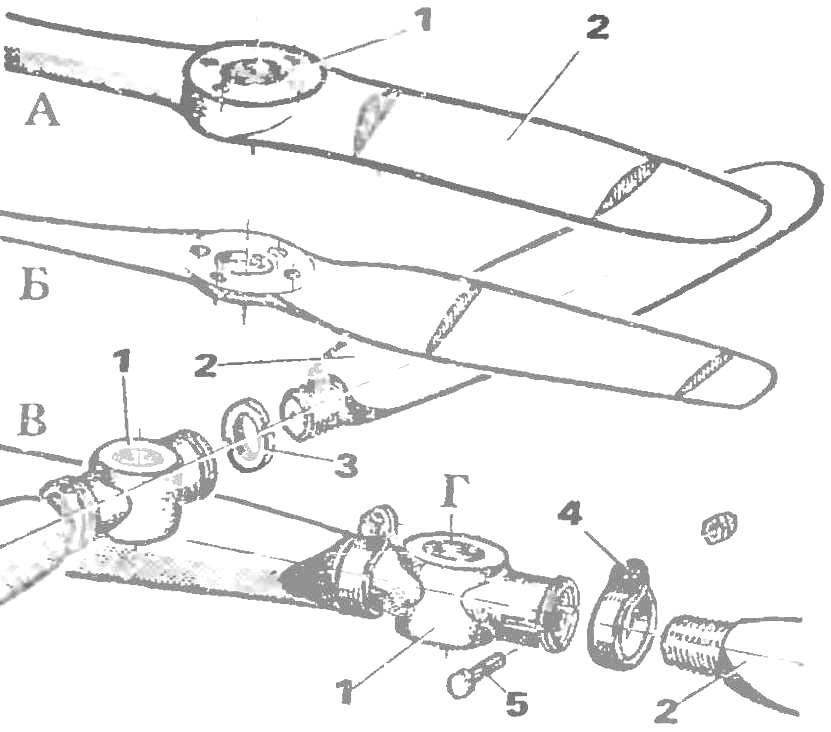
Рис. 2. Типы воздушных винтов:
А — деревянный блочный, Б — металлический блочный, В — винт с установкой лопастей на месте с контровочной гайкой, Г — винт с разрезной втулкой и стяжными хомутами.
1 — втулка, 2 — лопасть, 3 — контргайка, 4 — стяжной хомут, 5 — болт с гайкой.
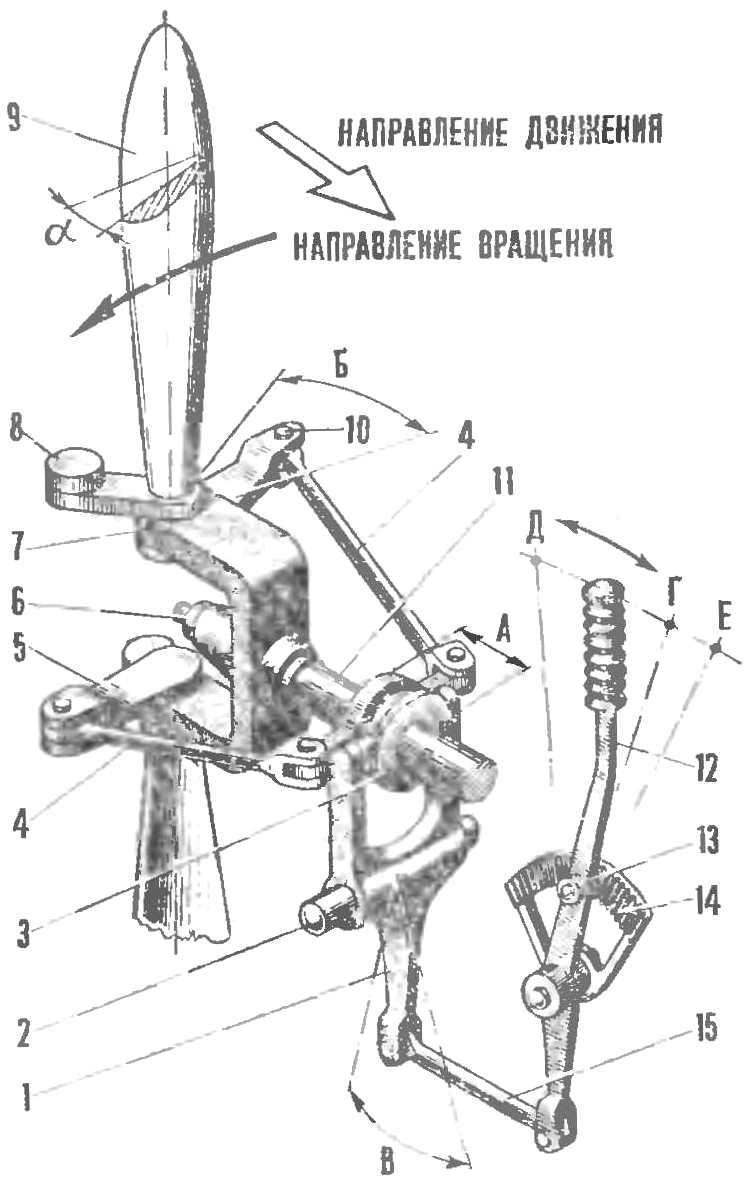
Рис. 3. Схема воздушного винта изменяемого шага с механическим управлением:
1 — промежуточная качалка, 2 — ось, 3 — скользящая муфта, 4 — тяга управления, 5 — рычаг лопасти, 6 — гайка крепления втулки, 7 — втулка винта, 8 — противовес, 9 — лопасть, 10 — шарнир тяги, 11 — приводной вал, 12 — рычаг управления изменением шага винта в кабине водителя, 13 — фиксатор рычага управления, 14 — зубчатый сектор, 15 — тяга.
А — ход муфты, Б — ход рычагов лопасти, В — ход промежуточной качалки, Г — ручка в положении малого шага, Д — ручка в положении большого шага, Е — ручка в положении реверса.
Если пластина не плоская, а выполнена в виде аэродинамического профиля (см. рис. 1Б), то в зависимости от его формы величина подъемной силы при прочих равных условиях значительно возрастает. Аэродинамический профиль более выгоден, чем прямая пластина. Скорость обтекания его верхнего и нижнего обводов различны, а следовательно, неоднозначно и давление. Поэтому такой профиль даже при нулевом угле атаки создает подъемную силу. В то же время сопротивление его меньше, чем у прямой пластины такой I толщины.
Важным параметром, определяющие назначение воздушного винта, является величина его шага (Н). Шаг определяется по углу атаки поперечного сечения лопасти, расположенного на 0,75 радиуса винта. Выражается Н расстоянием, которое проходит винт за один полный оборот. Винт образно можна сравнить с гайкой, наворачиваемой на болт. Расстояние, которое гайка проходит по резьбе за один полный оборот есть шаг. Он определяется по формуле:
где: R — радиус винта, α — угол атаки (установки) профиля.
Но болт и гайка — твердые тела. Воздушный же винт вращается в сжимаемой среде, имеющей малую плотность. При этом он проскальзывает продвигается вперед на значительно меньшее расстояние, чем его расчетный шаг.
Чем больше нагрузка на винт, больше величина скольжения и больше фактический шаг винта. Фактический шаг определяет нагрузку на приводной двигатель и влияет на экономичность.
Применение винтов изменяемого шага позволяет получить наибольший коэффициент полезного действия (КПД), а следовательно, и наибольшую тягу. Правда, только на одном, соответствующем этому шагу, расчетном режиме. Конструкторы аэросаней чаще всего изготавливают воздушные винты блочными, выполненными из цельного или склеенного деревянного бруса (рис. 2). Подобный винт можно сделать и из металла.
На практике в зависимости от дорожных условий желательно варьировать величину шага. При движении с места надо получить максимальную тягу (шаг винта при этом должен быть малым), а с увеличением скорости шаг надо увеличивать.
На рисунке изображены винты с шагом, изменяемым на месте. Такие винты получили большое распространение на самодельных аэросанях. Они могут быть двух-, трех- и четырехлопастными. Втулка и лопасти делаются отдельно. Втулка из стали или дюралюминия снабжается посадочным конусом со шпоночной канавкой для установки на приводной вал двигателя и имеет гнезда под лопасти винта. Гнезда могут быть резьбовыми (рис. 2В) или с проточенными кольцевыми канавками, если втулка разъемная (рис. 2 Г). Число гнезд соответствует количеству лопастей. Лопасти изготавливаются из дерева, пластика с усиленной комлевой частью или из металла. Если они крепятся на резьбе, то комлевая часть заканчивается резьбовым хвостовиком.
Для точной установки лопастей на нужный угол атаки на их хвостовики наносят контрольные риски, а на торцевой части каждого гнезда во втулке по транспортиру градуируют шкалу углов в нужном для данного винта диапазоне, например: от 3°—5° до 25°—30°. При сборке все лопасти устанавливаются на одинаковый угол и контрятся гайками.
Имея такой винт, водитель может в зависимости от предполагаемого режима работы аэросаней заранее установить лопасти на нужный угол атаки.
Удобнее иметь винт с изменяемым во время движения шагом. Их можно разделить на два типа: двухдиапазонные, которые могут по желанию водителя устанавливаться в два предельных положения — «малый» или «большой шаг», и с принудительной установкой лопастей на нужный шаг во всем диапазоне. Изменение шага осуществляется механическим приводом. Несмотря на большое разнообразие конструкций, все они в основном сводятся к принципиальной схеме, изображенной на рисунке 3.
В этой схеме винт имеет металлическую втулку с гнездами, в которые на шарикоподшипниках устанавливаются попасти. На комлевой части каждой лопасти есть рычаг, соединенный тягой со скользящей по приводному валу муфтой. При перемещении муфта поворачивает тяги лопасти, переводя их с большого шага на малый. Продвигаясь дальше, муфта может установить лопасти в положение реверса, то есть создать винтом обратную тягу для торможения саней.
Скользящая муфта перемещается по валу специальным рычагом из кабины водителя. Для фиксации рычага в нужном положении имеется зубчатый сектор. От рычага тягой или тросом усилие передается на промежуточную качалку, которая и передвигает скользящую муфту но приводному валу. Обычно управление изменением шага одностороннее — перевод лопастей возможен только в одну сторону: с большого шага на малый и в положение реверса. На большой шаг винт переходит сам под действием аэродинамических сил и моментов, создаваемых противовесами, установленными на комлевых частях лопастей.
Оригинально выполнен винт АВ-6 на двухместных аэросанях К-36 конструкции Н. И. Камова (рис. 4). Его лопасти поворачиваются траверсой, расположенной внутри вала редуктора. На комлевых частях лопастей вместо рычагов установлены штыри с надетыми на них сухарями, входящими в прорези траверсы.
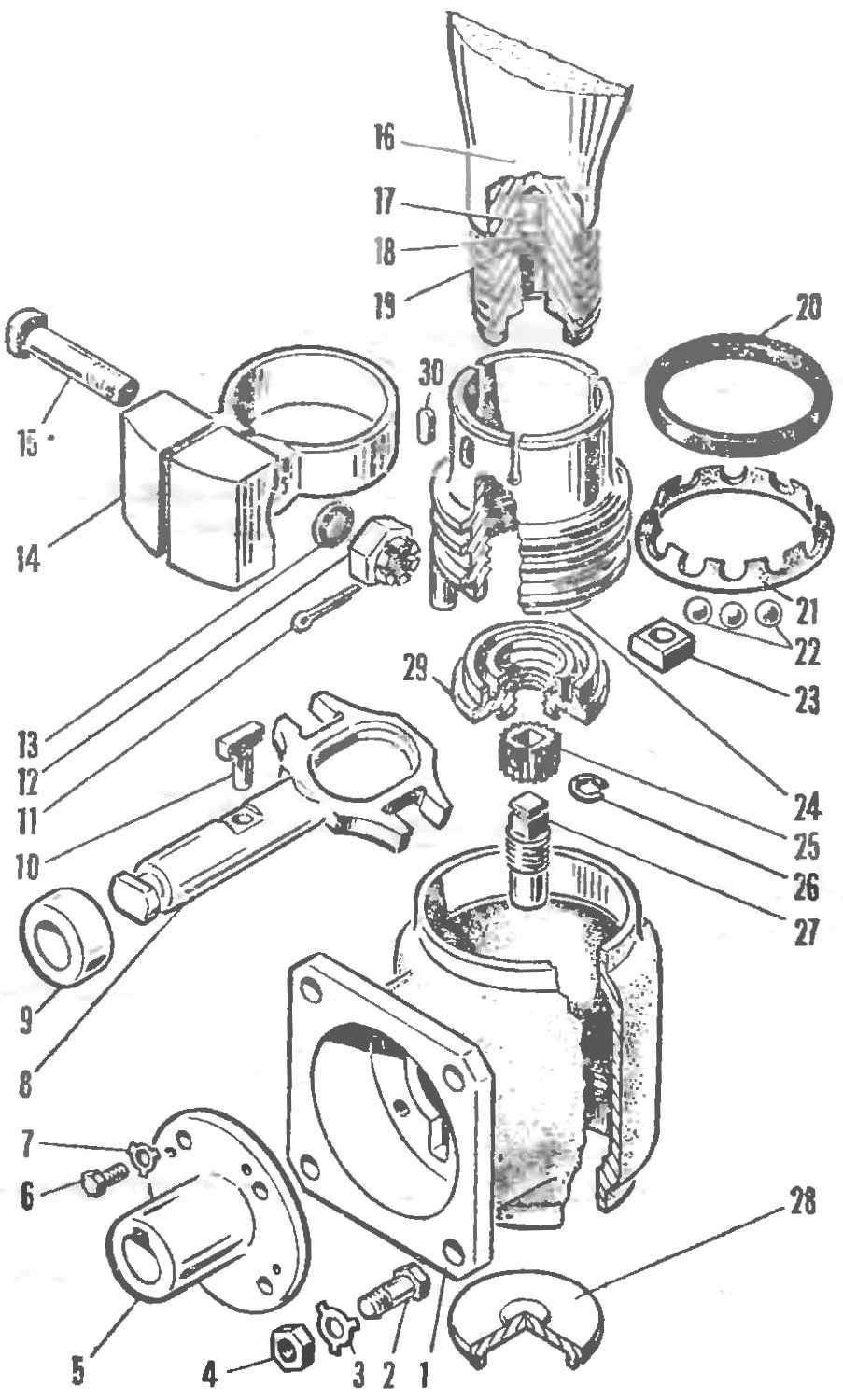
Рис. 4. Воздушный винт АВ-6:
1 — корпус втулки винта, 2, 6 — болт, 3, 7 — контровочная шайба, 4 — гайка, 5 — крышка, 8 — траверса, 9 — упорное кольцо реверса, 10 — шпонка, 11 — шплинт, 12 — гайка, 13 — шайба, 14 — противовес, 15 — болт противовеса, 16 — лопасть, 17 — балансировочный груз, 18 — глухая шайба, 19 — крепежная разрезная шайба, 20 — уплотнительная манжета, 21 — сепаратор, 22 — шарики, 23 — сухарь, 24 — стакан лопасти, 25 — контровочная втулка, 26 — стопорное кольцо, 27 — винт натяга, 28 — пята, 29 — дно стакана, 30 — шпонка противовеса.
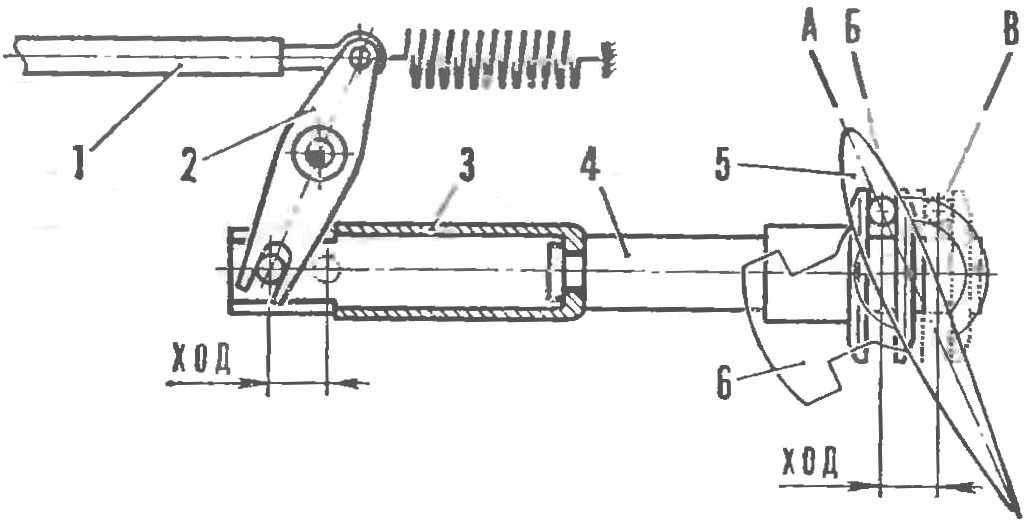
Рис. 5. Схема управления воздушного винта АВ-6:
1 — тяга управления, 2 — рычаг, 3 — скользящая муфта, 4 — траверса, 5 — лопасть, 6 — противовес; А — положение лопасти «большой шаг», Б — «малый шаг», В — реверс.

АВ-6 — металлический, двухлопастный, толкающий, правого вращения (если смотреть в направлении движения) винт. Работает от двигателя МТ-8 мощностью 38—40 л. с. через редуктор. Частота вращения 2630 об/мин, Ø1600 мм.
По типу он — центробежно-механический, реверсивный, с фиксацией лопастей на прямой передаче 8°30′, на реверсе — 19° 30′, то есть рабочий диапазон их хода — 11°. Углы поворота лопастей замеряются на радиусе 600 мм.
Конструктивно винт состоит из стальной втулки и двух дюралюминиевых лопастей. Втулка устанавливается на фланец редуктора. Для крепления лопастей во втулке сделаны два гнезда, в которые вставлены специальные стаканы. Последние поворачиваются в сепараторах с шариками. Зазоры устраняются специальным винтом натяга. Лопасти поворачиваются траверсой, передвигающейся на шпонке внутри вала редуктора. На торцах лопастных стаканов эксцентрично расположены пальцы с надетыми на них сухарями, скользящими в прорезях траверсы.
Траверса передвигается в продольном направлении тягой, соединенной со скользящей муфтой, которая, в свои очередь, соединена тягой с рычагов управления (рис. 5). На выходящих иг втулки концах стаканов с лопастями установлены противовесы — центробежные грузы. Они располагаются под углом 20° ±1° и закреплены на шпонках.
Винт работает по прямой схеме: под действием центробежных моментов, создаваемых противовесами, лопасти автоматически устанавливаются на шаг необходимый для данного режима движения. Перевод лопастей в реверсное положение осуществляется принудительно специальным рычагом, расположенным в кабине водителя Выгодный КПД винта сохраняется во всем диапазон работ.
Источник
ВИНТ С РЕГУЛИРУЕМЫМ ШАГОМ
Представим себе автомобиль без коробки скоростей. Мощность его мотора может быть передана задним колесам различными путями, однако, соотношение между шестернями мотора и задними колесами остается постоянным при всех скоростях автомобиля. Мощность, вырабатываемая мотором, зависит в этом случае от того, стоит ли автомобиль неподвижно или он находится в движении. Если мы хотим пустить в ход автомобиль без применения посторонней силы, передача от мотора на задние колеса должна быть такая же, как при первой скорости. После того как автомобиль тронулся, такое положение шестерен позволит мотору развить наибольшую мощность и достичь наивысших оборотов. На этом автомобиле мы сможем взбираться на гору, ехать по плохим дорогам, так как он будет иметь достаточную мощность; однако, скорость движения будет невелика.
Если мы произведем тот же опыт с автомобилем, который имеет только высшую (третью) скорость, — результат будет обратный. Стартовать будет очень трудно, дальнейшее ускорение будет итти очень медленно, и, чтобы добраться куда-либо, придется избегать подъемов. Такое устройство передачи не обеспечит гибкой работы мотора, поэтому наиболее приемлемым было бы нечто среднее между этими двумя скоростями.
Винт с постоянным шагом, который применялся на самолетах до последнего времени, давал те же результаты, что и автомобиль без коробки скоростей. Винт с регулируемым шагом значительно увеличивает возможности современного самолета по сравнению с коробкой скоростей, принятой в автомобилях.
Чтобы мотор с нагнетателем мог развить максимальную мощность, необходимую для взлета, он должен развить максимальное число оборотов в минуту. Это возможно только при винте с регулируемым шагом, лопасти которого расположены под малым углом. Благодаря такому винту транспортные самолеты могут отрываться от земли с большим грузом после небольшого пробега.
У винта с регулируемым шагом угол, образуемый лопастями, может быть изменен либо летчиком, либо автоматически. Цель автоматической регулировки — поддерживать постоянные обороты мотора по причинам, которые будут изложены ниже.
Рис. 331. Этим рисунком мы хотим показать, что винт меняет свой шаг так, чтобы полностью поглощать мощность, развиваемую мотором при 1 900 об/мин. Это изменение шага производится регулирующим приспособлением.
Самолет в положении L развил нормальную крейсерскую скорость. В положении М самолет слегка поднимается. Мотор продолжает работать при 1 900 об/мин, что означает, что он дает винту ту же мощность, хотя с увеличением лобового сопротивления нагрузка на винт увеличилась. Последнее обстоятельство компенсируется уменьшением шага винта.
Мощность мотора в положении L используется, главным образом, на увеличение горизонтальной скорости, в то время как в М она используется преимущественно на преодоление лобового сопротивления.
В положении N условия те же, что ив М. Однако, сопротивление движению, увеличившееся с увеличением угла подъема, компенсируется увеличением тяги винта вследствие уменьшения его шага. В положении 8 наблюдается обратное. С увеличением мощности мотора, само собой разумеется, необходимо увеличить размеры винта, для того чтобы поглотить эту мощность и не допустить чрезмерного увеличения скорости вращения вала мотора. Установлено, однако, что винт с очень большим диаметром несколько непропорционален размерам современных самолетов. Поэтому часто вместо двухлопастного винта применяется трехлопастный. Коэфициент его полезного действия несколько ниже. Скорость вращения винта всегда ограничена известным пределом. А именно скорость движения концов лопастей винта должна быть менее 300 м/сек; этим предотвращаются так называемые «потери», которые привели бы к понижению эффективности винта.
Имеется много образцов винтов с регулируемым шагом. В основном они все одинаковы, но в них применяются различные виды энергии, необходимой для изменения и регулирования шага. Наиболее характерны следующие типы: 1) винт, в котором для регулирования применяется гидравлическая сила (здесь шаг винта регулируется маслом под давлением); 2) винт, в котором используется электроэнергия.
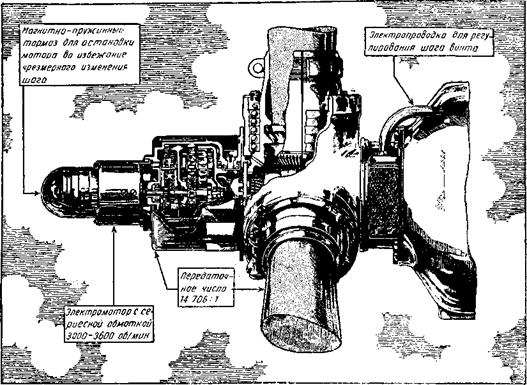
Рис. 332. Винт постоянной скорости Кертис. Лопасти этого винта изготовляются из дюралюминия или стали. В последнем случае они делаются пустотелыми. К ступице винта прикреплен небольшой моторчик, который создает силу, необходимую для изменения шага винта. Зубчатая передача с огромным передаточным числом, установленная между моторчиком и лопастями винта,
 |
делает этот моторчик очень сильным, так что он может преодолеть сопротивление винта.
Источником электроэнергии для мотора винта служит двадцативольтовая батарея, установленная на самолете. Шаг винта может изменяться автоматически с помощью шарикового (гироскопического) регулятора, который вращается мотором самолета; это делается для сохранения постоянной скорости вращения. Необходимое управление регулятором производится вручную пилотом. Когда не требуется автоматического изменения шага, регулятор выключают, и пилот сам устанавливает желательный шаг лопастей винта. Ток, поступающий от батареи к электромотору винта для изменения шага винта, проходит через магниты и тормоз, который мешает электромотору продолжать вращение после того, как ток выключен. Как только тормоз выключен, мотор начинает свою работу и изменяет шаг винта. Когда желательный шаг получен, действие регулятора выключает ток, идущий от батареи в электромотор. В этот момент тормозной магнит, не получая электроэнергии, уже не препятствует пружинному тормозу остановить вал электромотора. Шаг винта, по желанию, может быть переведен из полного положительного на полный отрицательный. Регулирование шага обеспечивает маневренность гидросамолетов на поверхности воды.
Рис. 333. В многомоторном самолете в случае остановки одного из моторов вся нагрузка ложится на моторы, продолжающие работать. Нагрузка на винты этих моторов увеличивается, и поэтому уменьшается быстрота вращения моторов. Однако, регулятор приостанавливает эту тенденцию мотора, уменьшая шаг винта ниже нормального и позволяя, таким образом, мотору сохранять свою мощность. Несмотря на большое напряжение работающих
моторов, самолет будет отставать, так как остановившийся мотор не только не тянет вперед, но, наоборот, создает дополнительное сопротивление во встречном воздушном потоке, который сам вращает винт. Этот бесполезный мотор в таких условиях отнимает около 75 л. с. от мощности работающих моторов (если каждый из моторов имеет 500 л. с.). Если мы прекратим провертывание остановившегося мотора, то он поглотит только 35 л. с. мощности работающего мотора. Если же мы приостановим не только провертывание «мертвого» мотора, но также и вращение его винта, то потеря мощности работающего мотора составит только около 10 л. с. Это означает, что в последнем случае самолет сэкономит больше мощности, которая сможет быть использована, например, для покрытия на одном моторе большего расстояния с большей безопасностью или для получения большей тяги от винта работающего мотора; большая тяга особенно необходима, когда один из моторов отказывает в работе вскоре после взлета самолета.
Взлет. Для сокращения разбега самолета при взлете, особенно когда самолет тяжело нагружен, необходимо большое ускорение. Такое ускорение можно получить только тогда, когда вся мощность мотора передается на винт и обеспечивает хорошую тягу винта. С этой целью регулятор винта устанавливают на максимально допускаемое мотором число оборотов; в этом положении лопасти будут установлены на самый малый шаг, что и позволит мотору развить максимальную мощность.
В то время как частичное увеличение мощности мотора, необходимое для отрыва, может быть достигнуто уменьшением угла лопастей винта, дальнейшее увеличение мощности возможно лишь при питании мотора большим количеством горючего и при увеличении давления во всасывающем патрубке с помощью нагнетателя; это вызывает образование большего количества тепловой энергии из большего количества горючего, посылаемого в цилиндр в минуту. Данная максимальная мощность мотора не может быть поддержана в течение долгого времени, потому что избыток тепла, собирающийся в цилиндрах, не может быть передан в воздух так же быстро, как он создается. Однако, на короткий период можно без опасения пустить мотор на полный ход, как это оговаривается специальными инструкциями, после чего необходимо понизить его нагрузку до минимального уровня, чтобы предупредить перегрев.
Набор высоты. При наборе высоты мы используем максимальную мощность мотора, допустимую в течение более или менее
продолжительного времени (однако, она меньше, чем мощность, допустимая для отрыва), обращая избыточную силу — сверх величины, необходимой для преодоления лобового сопротивления, — на быстрый подъем. Скорость набора высоты при наличии винта с регулируемым шагом увеличивается, так как избыток мощности мотора, используемый на подъем, возрастает. Во время подъема мотор вращается с постоянной скоростью, которая развивает определенную мощность при определенном давлении во всасывающем патрубке. Всякое изменение угла подъема увеличивает или уменьшает число оборотов мотора в минуту.
 |
Но регулятор, который управляет лопастями винта, соответственно изменяет шаг винта. Следовательно, мотор сохраняет свое число оборотов и свою мощность во время всего подъема. При этих условиях винт работает с постоянной эффективностью.
Крейсерская скорость. Как только самолет достигнет высоты, намеченной для горизонтального полета, регулятор скорости должен быть установлен соответственно числу оборотов
мотора, рекомендованному для крейсерской скорости; после этого давление во всасывающем патрубке может быть соответственно отрегулировано дросселем.
Независимо от положения носа самолета относительно горизонта, постоянно-скоростной винт будет сохранять то же самое число оборотов мотора; если даже самолет перейдет в пике, мотор не будет вращаться с большей скоростью.
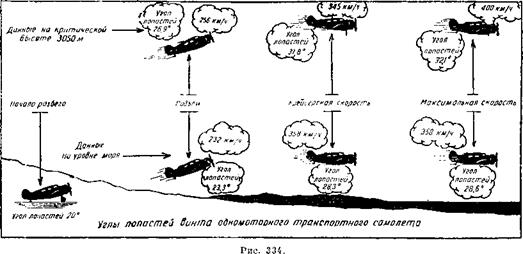
Рис. 334. На этом рисунке показаны: зависимость между углом установки лопастей, скоростью взлета, крейсерской скоростью и максимальной скоростью одномоторного транспортного самолета на уровне моря и на расчетной высоте мотора.
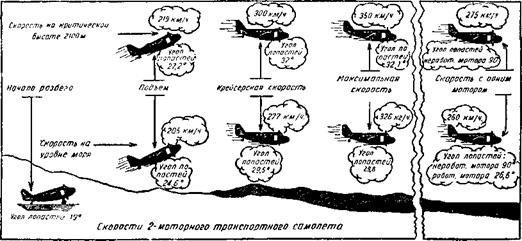
Рис. 335. Этот рисунок показывает то же, что и рис. 334, но на нем рассматривается двухмоторный транспортный самолет. В правой стороне рисунка показано, как меняется угол установки лопастей винта работающего мотора на уровне моря и на расчетной высоте в случаях, когда один из моторов не работает.
Рис. 336. Этот рисунок показывает вам полетные качества транспортного самолета, мотор которого имеет или винт с постоянным шагом или винт, имеющий только две возможные установки шага (минимальный и максимальный шаг), или винт Кертис.
Источник