- Умная трость для слабовидящих людей на основе Arduino
- Необходимые компоненты
- Работа схемы
- Объяснение программы для Arduino
- Датчик контроля слепой зоны своими руками: насколько сложно и есть ли смысл
- Бюджетное устройство на базе Arduino для незрячих (open hardware)
- Ультразвуковой датчик
- Плата управления
- Элементы питания
- Зарядка аккумуляторов
- Сигнализатор
- Корпус
- Результат испытаний опытных образцов
- Наши планы
Умная трость для слабовидящих людей на основе Arduino
В этой статье мы рассмотрим «умную» трость (посох) для слабовидящих (слепых) людей на основе платы Arduino, которая будет более функциональна чем обычная трость.
![]()
Наша умная трость будет включать в себя ультразвуковой датчик для определения расстояния до препятствия, фоторезистор для измерения условий освещенности и модуль удаленного управления, с помощью которого слабовидящий человек может удаленно определять местоположение этой трости. Обратная связь со слабовидящим человеком обеспечивается при помощи зуммера (Buzzer). Вместо зуммера можно также использовать какое-нибудь другое вибрационное устройство – на ваш выбор.

Необходимые компоненты
- Плата Arduino Nano (другой тип платы также подойдет) (купить на AliExpress).
- Ультразвуковой датчик HC-SR04 (купить на AliExpress).
- Фоторезистор (купить на AliExpress).
- Зуммер (купить на AliExpress) и светодиод (купить на AliExpress).
- Регулятор напряжения 7805 (купить на AliExpress).
- Радиочастотный передатчик и приемник на частоте 433 МГц (купить на AliExpress).
- Резисторы (купить на AliExpress).
- Конденсаторы (купить на AliExpress).
- Кнопка.
- Перфорированная плата.
- Набор для пайки.
- Батарейка на 9 В
Работа схемы
Для проекта нашей умной трости необходимо две отдельные схемы. Главная схема будет монтироваться на трости для слабовидящего человека. А вторая схема представляет собой маленький радиочастотный передатчик, которая нужна для определения местоположения основной схемы. Главная часть схемы приведена на следующем рисунке:
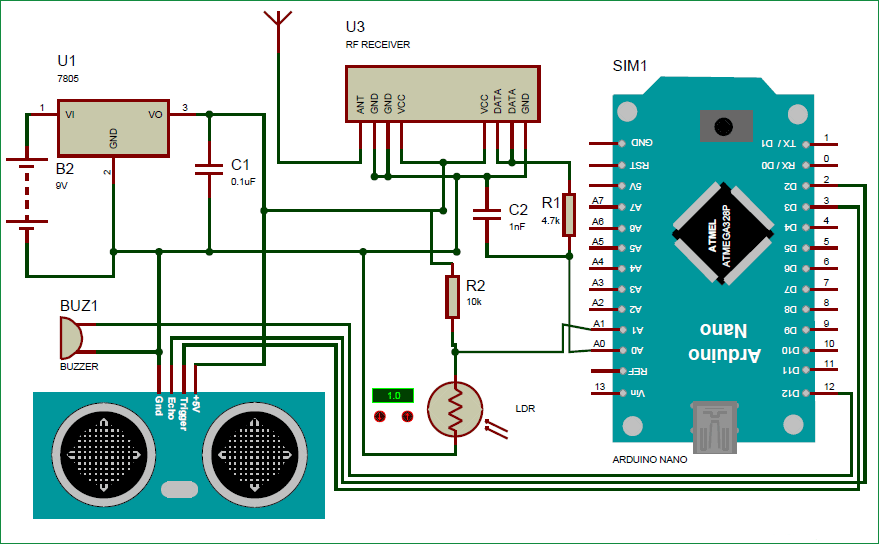 На этой схеме плата Arduino Nano используется для управления всеми процессами. Вся схема запитывается от батарейки на 9 В и регулятора напряжения 7805, который обеспечивает стабильное напряжение +5V. Ультразвуковой датчик запитывается от 5V, а его контакты trigger и Echo подключены к контактам 2 и 3 платы Arduino. Фоторезистор и резистор 10 кОм образуют делитель напряжения, с выхода которого напряжение подается на аналоговый контакт A1 (для последующего АЦП) платы Arduino. Аналоговый контакт A0 платы Arduino используется для считывания сигнала с радиочастотного приемника. Зуммер подключен к контакту 12 платы Arduino.
На этой схеме плата Arduino Nano используется для управления всеми процессами. Вся схема запитывается от батарейки на 9 В и регулятора напряжения 7805, который обеспечивает стабильное напряжение +5V. Ультразвуковой датчик запитывается от 5V, а его контакты trigger и Echo подключены к контактам 2 и 3 платы Arduino. Фоторезистор и резистор 10 кОм образуют делитель напряжения, с выхода которого напряжение подается на аналоговый контакт A1 (для последующего АЦП) платы Arduino. Аналоговый контакт A0 платы Arduino используется для считывания сигнала с радиочастотного приемника. Зуммер подключен к контакту 12 платы Arduino.
Схема радиочастотного передатчика приведена на следующем рисунке.
![]()
Здесь мы использовали небольшой «лайфхак» чтобы наши радиочастотные части схемы заработали так, как это нам необходимо. В обычном режиме для работы радиочастотных модулей 433 МГц необходимы шифратор (кодер) и дешифратор (декодер), либо же два узла управления многосторонней связью (MCU). Но в нашем проекте приемной части необходимо лишь обнаруживать передает ли передатчик какие либо сигналы. Поэтому контакт данных (Data pin) нашего радиочастотного передатчика мы подключили к корпусу (земле).
Контакт данных (data pin) радиочастотного приемника через RC фильтр подается на плату Arduino как показано на схеме. Теперь при нажатии кнопки на схеме передатчика приемник будет часто подавать на вход аналогово-цифрового преобразователя (АЦП) на контакте A0 платы Arduino определенный уровень напряжения. Эти повторяющиеся уровни напряжения нельзя будет наблюдать на входе контакта A0 платы Arduino когда кнопка в передающей части не нажата. То есть мы в программе для Arduino должны будем проверять поступление этих повторяющихся значений на вход контакта A0 платы Arduino чтобы определить нажата кнопка в передающей части или нет. Таким образом слабовидящий человек сможет находить свою трость.
Мы спаяли этот проект на перфорированной плате чтобы соединения не контактировали с тростью. Внешний вид получившейся у нас конструкции представлен на рисунке ниже. Однако вы, при желании, можете использовать макетную плату.


Объяснение программы для Arduino
После того как вы соберете всю аппаратную часть проекта можно будет приступать к программированию платы Arduino. Полный код программы приведен в конце статьи, здесь же мы обсудим его наиболее важные фрагменты.
Сначала в функции void setup() мы инициализируем входные и выходные контакты платы Arduino. В нашем проекте контакты, к которым подключаются Buzzer и Trigger pin, будут выходными, а контакт, к которому подключается Echo pin, входным. Мы также инициализируем монитор последовательной связи (serial monitor) для целей отладки.
Источник
Датчик контроля слепой зоны своими руками: насколько сложно и есть ли смысл

Радарные датчики мертвой зоны – действительно полезная опция из числа систем активной безопасности и помощи водителю, но для многих машин они в принципе отсутствуют в списке опций, а для других доступны лишь в дорогущих комплектациях… Впрочем, китайские ремесленники успешно наладили выпуск универсальных систем ДМЗ, поставить которые на автомобиль можно своими руками в собственном гараже. Не рекламируя ничего конкретного, попробуем поставить такой радар самостоятельно и посмотрим, насколько он будет эффективен.
Проблема ограниченного обзора в боковые зеркала заднего вида существовала всегда. Долгое время с ней боролись исключительно оптическими методами – увеличением общей сферичности зеркал или установкой на них выпуклых сегментов. Такая тактика помогала лишь отчасти, неся одновременно и неудобства в виде искаженного восприятия. Но в 2000-х годах начали появляться первые электронные помощники. Едва ли не пионером в середине 2000-х стала Volvo cо своей системой BLIS, которая представляла собой миниатюрные камеры в зеркалах, чей сектор обзора совпадал со слепыми зонами. При появлении движения в камерах водитель видел вспыхивающие индикаторы с соответствующей стороны, предупреждающие об опасности перестроения. Минусом такого подхода была быстрая загрязняемость камер в ненастную погоду…
Чуть позже Bosch вывел на рынок аналогичную технологию, построенную на ультразвуковых сонарах в углах заднего бампера – собственно, выполненную по принципу всем известных парктроников. Ее использовал Citroen и, кажется, кто-то еще, но достаточно быстро стало понятно, что максимальную эффективность и надежность могут дать лишь радарные радиоволновые датчики, работающие, как и все радары, на эффекте Допплера. Сложность заключалась лишь в сертификации этих систем в разных странах по причине занятости тех или иных высокочастотных участков – порой производителям приходилось изымать эту опцию из комплектации в отдельных регионах или переводить на иные частоты.
К концу 2000-х годов оптические и ультразвуковые системы практически ушли в тень, а радарные системы мониторинга слепых зон появились у всех автопроизводителей. Впрочем, опция эта продолжала оставаться признаком весьма дорогого сегмента и в среднем и доступном классе отсутствовала. Некоторые мелкие производители автогаджетов начали, правда, выпускать продвинутые комплекты универсальных парктроников, в которых имелись особые дополнительные датчики, устанавливаемые в углы бамперов и работающие в движении, а также отдельные индикаторы для них, оповещающие об обнаружении помехи в районе задних крыльев, невидимой в зеркала. Впрочем, особой стабильностью работы они похвастаться не могли и популярности не снискали.
Тем не менее в последнюю пятилетку радарные системы ДМЗ (датчиков мертвых зон) массово проникли в среднеценовой сегмент. К примеру, у Kia эта система доступна, начиная с Ceed, у Volkswagen – с Jetta и так далее, у Toyota – с Corolla и так далее. Для тех же Rio, Polo, Logan и прочих народных седанов, хетчбеков и мини-кроссоверов эти опции недоступны… Китайский комплект датчиков же можно поставить на любой автомобиль, чем мы, собственно, и занялись.
Различаются эти системы стоимостью и комплектацией, при том что основные элементы и характеристики у всех одинаковые. Отличия заключаются, например, в способе индикации – в самом простом варианте «лампочки» клеятся на двусторонний скотч внутри салона на стойки лобового стекла, а в более продвинутом предлагаются сменные зеркальные элементы с интегрированными световыми индикаторами в наружные зеркала, на которые нужно заменить штатные. В еще более дорогих версиях в комплекте радара ДМЗ идут два боковых зеркала полностью в сборе – под конкретный автомобиль. Некоторые наборы подключаются только к лампам поворотников, а некоторые – даже к CAN-шине…
«Персонализированные» комплекты, предназначенные для конкретной модели автомобиля конкретного поколения, существенно дороже. Однако есть ли смысл менять оригинальные и заведомо качественные зеркала на безродный китайский клон? Большой вопрос… Нам кажется, что оптимальным решением тут является все же самый бюджетный вариант системы ДМЗ. Наш обошелся в относительно скромные 6000 рублей. Название его мы не приводим, поскольку смысла в этом нет – известных брендов вы не встретите, и ориентироваться лучше всего на количество заказов и русскоязычные отзывы в интернет-магазине.
В комплекте любого набора ДМЗ идут два радарных датчика (обычно работающих в диапазоне 24 гГц). Датчики имеют П-образные кронштейны для крепления, квадратики двустороннего скотча и горстку саморезов для их фиксации к кузову под задним бампером. К П-образной пластине корпус датчика крепится парой винтов шарнирно, что позволяет их выставить на необходимый угол (об этом ниже).
Источник
Бюджетное устройство на базе Arduino для незрячих (open hardware)

Несколько лет назад поставил перед собой задачу разработать комплекс недорогих устройств, позволяющий незрячим людям лучше адаптироваться к окружающему нас миру. На сегодняшний день мне вместе с командой единомышленников удалось реализовать несколько проектов.
В этой статье хочу рассказать об ультразвуковой насадке на трость и ультразвуковом брелоке – полноценных устройствах, которые собираются из недорогих доступных модулей.
Ультразвуковой насадка на трость и ультразвуковом брелок – устройства для незрячих людей, которые предупреждают о препятствиях, находящихся выше уровня, на котором их можно обнаружить с помощью обычной трости. Такими препятствиями могут быть автомобили с высокой посадкой, шлагбаумы, высокие заборы. Ультразвуковая насадка крепится на обычную трость, а ультразвуковой брелок вешается на шею или носится в руке, как фонарик.
Работа устройств основана на отражении ультразвуковых волн от препятствий. Измеряя разницу во времени между моментом генерации импульса и моментом приёма отражённого эхо-сигнала, можно определить расстояние до препятствия.
Для разработки устройств необходимо подобрать датчик для измерения расстояния, плату управления и сигнализатор, подобрать элементы питания, способ их зарядки и подходящие корпуса.
Ультразвуковой датчик
Для измерения расстояния до препятствия были протестированы два устройства:
- Arduino-совместимый ультразвуковой модуль HC-SR04
- Автомобильный парктроник HO 3800
Оба устройства работают по схожему принципу. Отличия заключаются в диаграмме направленности датчиков, максимальной дальности определения препятствий и конструктивном исполнении.
Сравнение параметров датчиков:
| Параметр | HC-SR04 | HO 3800 |
|---|---|---|
| Максимальная дальность, м | 4 | 2,5 |
| Напряжение питания, В | 5 | 5 |
| Количество датчиков в одном устройстве | 1 | 4 |
| Вывод информации | аналоговый | цифровой |
В ходе испытаний выяснилось, что модули HC-SR04 обладают несколько худшей способностью обнаруживать препятствия и работать в сложных климатических условиях (холод).
Оба датчика, несмотря на их различия, можно использовать в ультразвуковой насадке на трость в качестве средства измерения расстояния до препятствия, поэтому основным параметром при выборе датчика для нас стала цена. Мы остановились на более дешёвом датчике HC-SR04.
Плата управления
В качестве платы управления выбрана платформа Arduino. В нашем случае наиболее применимы платы миниатюрных версий: Arduino Mini, Arduino Nano или Arduino Pro Mini. В общем случае может быть использован любой другой контроллер, предоставляющий аналогичные возможности.
Элементы питания
Для обеспечения устройства питанием целесообразно использовать литий-ионные (Li-ion) или никель-металл-гидридные (Ni-Mh) аккумуляторные элементы.
При эксплуатации в нормальных климатических условиях имеет смысл применить Li-ion аккумуляторы, имеющие по сравнению с Ni-Mh следующие преимущества:
- простота реализации схемы зарядки
- наличие готовых модулей заряда
- большее выходное напряжение
- многообразие габаритных размеров и ёмкостей
При низких температурах предпочтительнее использовать Ni-Mh аккумуляторы.
Напряжения на выходе одного Ni-Mh аккумулятора (1,0 -1,4 В) недостаточно для работы устройства. Для получения напряжения 5 В (необходимого для работы как Arduino, так и паркторника) кроме аккумуляторов будем использовать повышающий DC-DC преобразователь.
Для работы выбранных нами DC-DC преобразователей необходимо обеспечить входное напряжение 0,9-6,0 В. Для получения требуемого выходного напряжения можно было бы воспользоваться одним Ni-Mh элементом напряжением 1,2 вольт. Однако с уменьшением входного напряжения уменьшается и нагрузочная способность преобразователя, поэтому для стабильной работы устройства желательно подавать на вход преобразователя не менее 2 В (два Ni-Mh элемента по 1,2 В или один Li-ion элемент напряжением 3,7 В). Отметим, что существуют DC-DC преобразователи, для работы которых недостаточно входного напряжения 1,2 В.
Зарядка аккумуляторов
Для Li-ion аккумуляторов существует множество готовых недорогих модулей с индикацией окончания заряда.
В случае с Ni-Mh аккумуляторами всё сложнее. Готовых встраиваемых решений на рынке в данный момент мы не нашли. Для зарядки Ni-Mh аккумуляторов можно использовать специализированные внешние зарядные устройства или же создать собственную схему зарядки.
Один из способов зарядить Ni-Mh элемент – последовательное соединение c аккумулятором двух линейных стабилизаторов LM317 (или аналогичных): первый – в режиме ограничения тока, второй – в режиме ограничения напряжения.
Входное напряжение такой схемы составляет 7,0-7,5 В. При отсутствии охлаждения стабилизаторов превышать это напряжение не рекомендуется. Напряжение на каждом Ni-Mh аккумуляторе во время зарядки должно быть около 1, 45 В (напряжение полностью заряженного Ni-Mh элемента). Во избежание перегрева и выхода из строя микросхем, ток зарядки аккумуляторов не должен превышать 100 мА и может быть увеличен до 200 мА при использовании соответствующих радиаторов.
Преимущество такой схемы зарядки заключается в отсутствии необходимости контролировать состояние зарядки: при достижении нужного напряжения на элементе ток автоматически упадёт до безопасного минимума.
Сигнализатор
В зависимости от выбора канала предупреждения (слуховой или тактильный) выбирается исполнительное устройство – зуммер или вибро-мотор. Кроме того, можно комбинировать оба способа оповещения, предоставив пользователю возможность переключения между ними.
В ходе тестирования прототипов мы выяснили, что удобнее всего передавать информацию о близости препятствия через вибрацию, т.к. в этом случае не занимается очень важный для незрячего человека аудио канал. Поэтому все разработанные и собранные нами изделия используют вибрацию для предупреждения о препятствии. Интенсивность вибрации пропорциональна расстоянию до препятствия.
Корпус
Нам не удалось подобрать удобный корпус для ультразвуковой насадки на трость среди массово выпускаемых корпусов. Для проведения испытаний устройства мы использовали напечатанный на 3D-принтере корпус из ABS-пластика. Для печати корпуса на 3D-принтере нами была разработана следующая 3D-модель:
Результат испытаний опытных образцов
В процессе разработки было собрано более 12 вариантов изделия. Каждое новое изделие устраняло недостатки предыдущих: в процессе разработки мы уменьшили габариты и вес изделия, подобрали ультразвуковой датчик, удовлетворяющий нас как по цене, так и по техническим характеристикам, отказались от использования аудио канала и оптимизировали алгоритм работы устройств. Совместно с незрячими (Бортников П.В., Шалинцев В. А.) были проведены испытания всех собранных изделий. В результате нами был получен конечный образец.
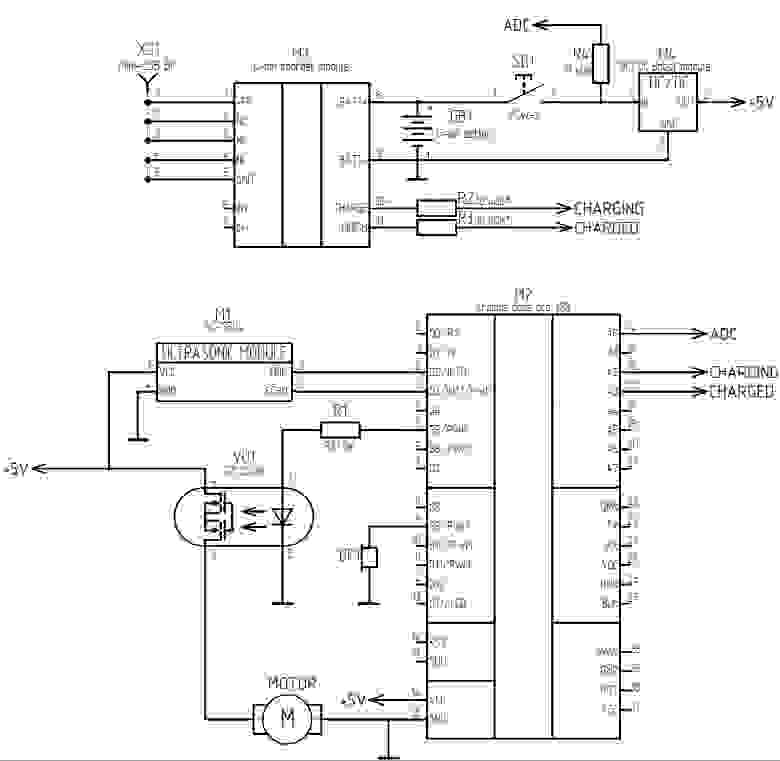
Ниже приведены принципиальная электрическая схема разработанного устройства:
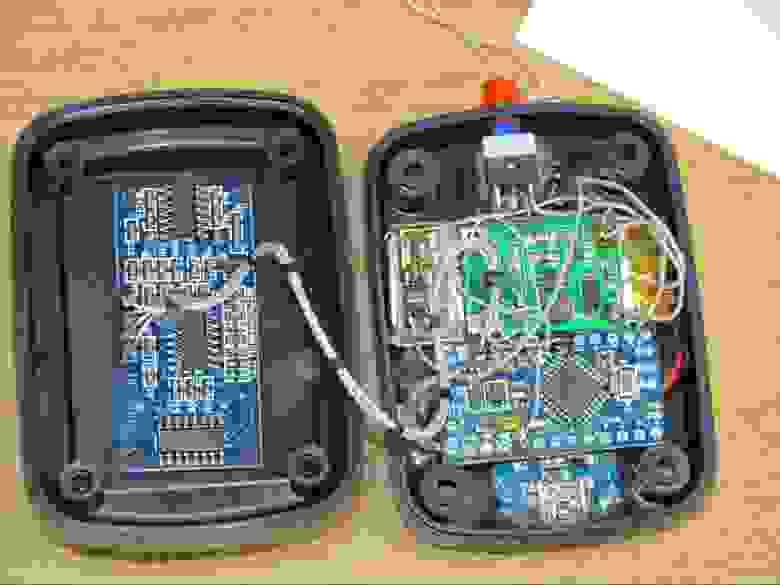
В разобранном виде ультразвуковой брелок на шею выглядят следующим образом:
Все использованные при сборке компоненты, кроме распечатанного на 3D-принтере корпуса для насадки на трость, были куплены через AliExpress:
- Ультразвуковой датчик HC-SR04.
- Плата управления Adruino Pro Mini.
- Аккумуляторная батарея 3.7 V 300 mAh.
- Преобразователь напряжения 0.9V
5V to 5V 600 mA.
Внешний вид и цены (с учётом доставки из Китая) компонентов, используемых для сборки ультразвуковой насадки на трость, приведены на рисунке:
Из используемых при сборке компонентов наибольший вклад в стоимость устройства вносит корпус, напечатанный на 3D-принтере.
Внешний вид и цены (с учётом доставки из Китая) компонентов, используемых для сборки ультразвукового брелока, приведены на рисунке:
В дальнейшем можно разработать крепление к корпусу Gainta G1906 и использовать устройство с таким корпусом в качестве насадки на трость.
Одним из способов снижения себестоимости устройств является экономия на оплате труда и стоимости доставки компонентов устройств в Россию за счёт развёртывания производства непосредственно в Китае.
Разработанные нами устройства имеет следующие характеристики:
| Характеристика | Значение |
|---|---|
| Дальность обнаружения препятствий | 1,5 метра |
| Среднее время работы на одном заряде | 8 часов |
| Количество уровней вибрации | 3 (1,5 м/1,0 м/0,7 м) |
| Способ зарядки | mini usb |
После проведения предварительных испытаний устройств, мы были вынуждены ограничить дальность обнаружения препятствий до 1,5 метров, для того чтобы не было лишних срабатываний при использовании устройств в потоке людей. При непрерывном изменении уровня вибрации сложнее определить приближение препятствия, поэтому по результатам предварительных испытаний мы остановились на трёх уровнях вибрации.
Внешний вид ультразвуковой насадки на трость:



Внешний вид брелока на шею:



3D-модель ультразвуковой насадки на трость и исходный код прошивки для Adruino доступны для загрузки по ссылке.
Наши планы
Для производства небольшой партии изделий, необходимой для проведения финальных испытаний на большой выборке незрячих людей, мы начали сбор средств на краудфандинговой площадке Indiegogo.
По окончании разработки на сайте проекта будет выложена вся необходимая информация для организации производства ультразвуковых насадок на трость и ультразвуковых брелоков (описание проекта, конструкторская документация, программный код).
В будущем мы планируем наладить массовое производство устройств для незрячих. Для снижения себестоимости и конечной цены устройств будем пробовать размещать производство в Китае.
Источник